# 概述
## 认识DXFlight
DXFlight能够创建和使用可信的自主无人驾驶车辆系统,以造福所有人。DXFlight提供了一套全面的工具,几乎适用于任何车辆和应用。作为一个开源项目,它根据来自大型用户社区的快速反馈不断发展。开发团队与社区和商业合作伙伴合作,为DXFlight添加使每个人都受益的功能。虽然DXFlight不生产任何硬件,但DXFlight固件适用于各种不同的硬件,以控制所有类型的无人驾驶车辆。结合地面控制软件,运行DXFlight的无人驾驶车辆可以具有先进的功能,包括与操作员的实时通信。DXFlight拥有庞大的在线社区,致力于帮助用户提出疑问,问题和解决方案
直升机 -- 飞机 -- 漫游车 -- 潜艇 -- 天线跟踪器
 ### 硬件
硬件是充当车辆眼睛、耳朵、大脑和手臂的外围传感器、控制器和输出设备。
几乎任何移动机器都可以通过简单地将一个小硬件包集成到其中来转换为自动驾驶汽车。硬件包从控制器开始。
使用来自传感器的输入,控制器能够将输出发送到ESC,伺服,万向节和其他外围设备等设备。
### 硬件
硬件是充当车辆眼睛、耳朵、大脑和手臂的外围传感器、控制器和输出设备。
几乎任何移动机器都可以通过简单地将一个小硬件包集成到其中来转换为自动驾驶汽车。硬件包从控制器开始。
使用来自传感器的输入,控制器能够将输出发送到ESC,伺服,万向节和其他外围设备等设备。
 ### 固件
固件 - 是在控制器上运行的代码。您可以选择与您的飞行器和任务相匹配的固件:直升机、飞机、漫游车、潜艇或天线跟踪器。
选择权在您手中 - 一个自动驾驶仪适用于任何任务。
### 固件
固件 - 是在控制器上运行的代码。您可以选择与您的飞行器和任务相匹配的固件:直升机、飞机、漫游车、潜艇或天线跟踪器。
选择权在您手中 - 一个自动驾驶仪适用于任何任务。
 ### 软件
软件是您与控制器的接口。也称为地面控制站(GCS),该软件可以在PC或移动设备上运行。
GCS 允许用户设置、配置、测试和调整车辆。高级软件包允许自主任务规划、操作和任务后分析。
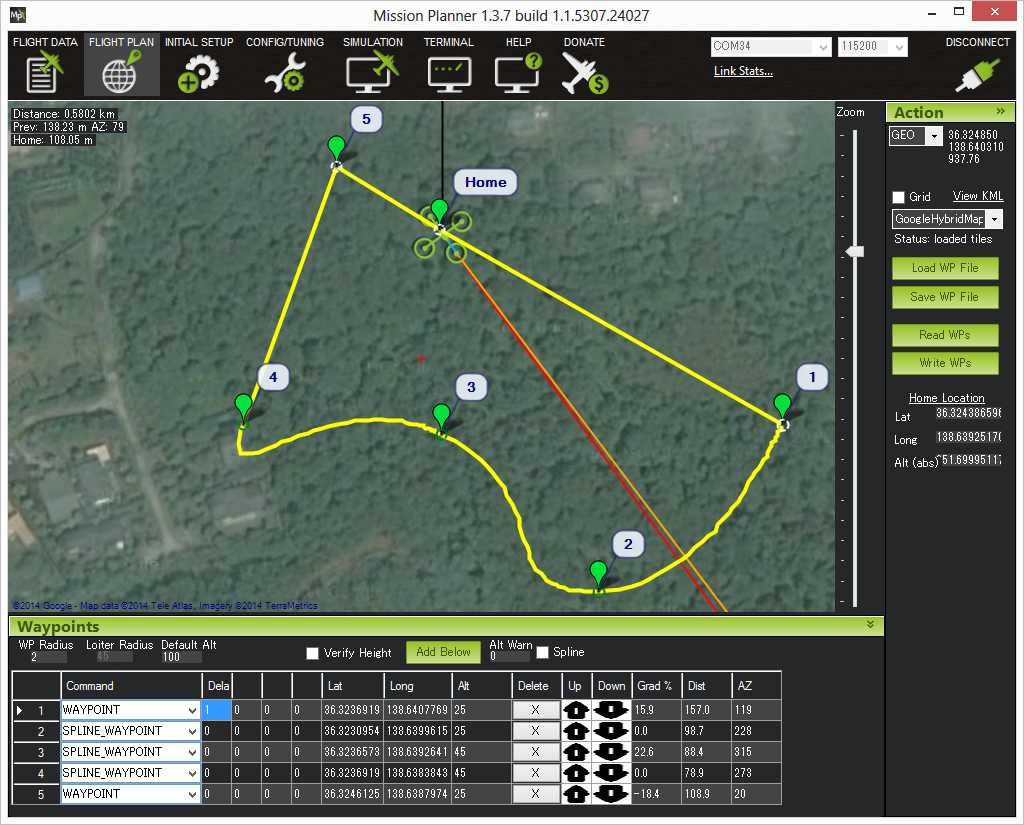
### Mission planner
Mission Planner是由ArduPilot支持的全功能GCS。它提供与硬件的点击式交互、自定义脚本和模拟。
### 软件
软件是您与控制器的接口。也称为地面控制站(GCS),该软件可以在PC或移动设备上运行。
GCS 允许用户设置、配置、测试和调整车辆。高级软件包允许自主任务规划、操作和任务后分析。
### Mission planner
Mission Planner是由ArduPilot支持的全功能GCS。它提供与硬件的点击式交互、自定义脚本和模拟。
 ## DXFlight文档
有关DXFlight文档的链接,请参见侧边栏。
## 功能
* 由社区支持的可用功能的完整文档,以帮助您设置任何车辆以满足您的需求
* 许多命令模式适合各种类型的车辆:Acro,稳定,悬停,Alt-hold,返回发射,着陆,跟随我,地理围栏等。
* 自主飞行模式,执行具有高级功能的完全脚本化的任务。
* 先进的故障保护选项可在失去控制信号、电池电量不足或其他系统故障的情况下让您高枕无忧。
* 三轴摄像机控制和稳定,快门控制,带可编程屏幕显示的实时视频链接
* GCS 和控制器之间的实时双向通信,包括 GPS 位置、电池状态和其他实时信息。
* 完整的数据记录,用于全面的任务后分析,带有图形和谷歌地球测绘工具
* 适用于所有类型的车辆的行业领先控制算法,具有强大的传感器补偿算法、滤波和调谐功能
* 没有死胡同 - 高级用户将找到无穷无尽的定制和扩展任务能力的选项
## DXFlight文档
有关DXFlight文档的链接,请参见侧边栏。
## 功能
* 由社区支持的可用功能的完整文档,以帮助您设置任何车辆以满足您的需求
* 许多命令模式适合各种类型的车辆:Acro,稳定,悬停,Alt-hold,返回发射,着陆,跟随我,地理围栏等。
* 自主飞行模式,执行具有高级功能的完全脚本化的任务。
* 先进的故障保护选项可在失去控制信号、电池电量不足或其他系统故障的情况下让您高枕无忧。
* 三轴摄像机控制和稳定,快门控制,带可编程屏幕显示的实时视频链接
* GCS 和控制器之间的实时双向通信,包括 GPS 位置、电池状态和其他实时信息。
* 完整的数据记录,用于全面的任务后分析,带有图形和谷歌地球测绘工具
* 适用于所有类型的车辆的行业领先控制算法,具有强大的传感器补偿算法、滤波和调谐功能
* 没有死胡同 - 高级用户将找到无穷无尽的定制和扩展任务能力的选项