MAV代理
用于基于 MAVLink 的系统的无人机地面站软件包
MAVProxy是用于无人机的全功能GCS,设计为A 极简主义,便携式和可扩展的GCS,适用于任何支持以下功能的自治系统 MAVLink协议(例如使用ArduPilot的协议)。 MAVProxy是一款功能强大的基于命令行的“开发人员”地面站软件。它可以通过附加模块进行扩展,也可以与另一个地面站(如Mission Planner,APM Planner 2,QGroundControl等)进行补充,以提供图形用户界面。
它具有许多关键功能,包括能够通过UDP将来自无人机的消息通过网络转发到其他设备上的多个其他地面站软件。
MAVProxy 通常被开发人员(尤其是 SITL)用于测试新版本。
MAVProxy最初由堪培拉无人机开发, 支持使用伴随计算和多个数据链 ArduPilot。它已经发展成为ArduPilot中最通用的工具之一。 生态系统,以及用户现在在其他GCS工具中看到的许多功能 它们的起源可以追溯到MAVProxy。
特征¶
它是一个基于控制台的命令行应用程序。包括插件 在 MAVProxy 中提供基本的 GUI。
可以联网并在任意数量的计算机上运行。
它是便携式的;它应该在任何带有python,pyserial,的POSIX操作系统上运行。 和函数调用,这意味着 Linux、OS X、Windows 和 别人。
select()轻巧的设计意味着它可以轻松地在小型上网本上运行。
它支持可加载模块,并具有支持控制台的模块, 移动地图、操纵杆、天线跟踪器等
命令的制表符完成。
截图¶
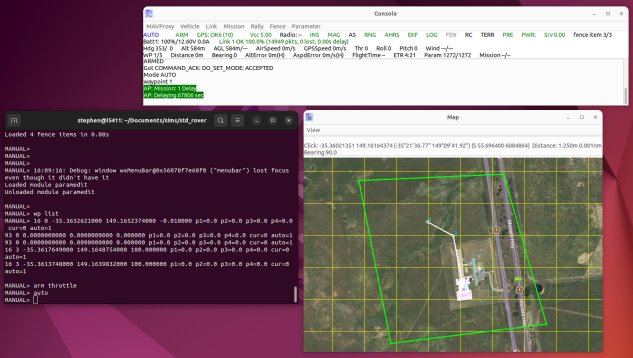
在 Ubuntu 下运行的 MAVProxy¶

在Windows 7下运行的MAVProxy¶
课程摘要卡¶
此处提供了常用 MAVProxy 命令的表。
许可证¶
MAVProxy 在 GNU 通用公共许可证 v3 或更高版本下发布。
核心团队¶
MAVProxy由Andrew Tridgell,Peter Barker和Stephen Dade维护
目录¶
Last updated