> For the complete documentation index, see [llms.txt](https://yuelan-icus-organization.gitbook.io/pei-tao-ji-suan-ji/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://yuelan-icus-organization.gitbook.io/pei-tao-ji-suan-ji/ros/cong-rviz-fa-song-ming-ling.md).
# 从 rviz 发送命令
## 从 rviz 发送命令[¶](https://ardupilot.org/dev/docs/ros-rviz.html#sending-commands-from-rviz)
[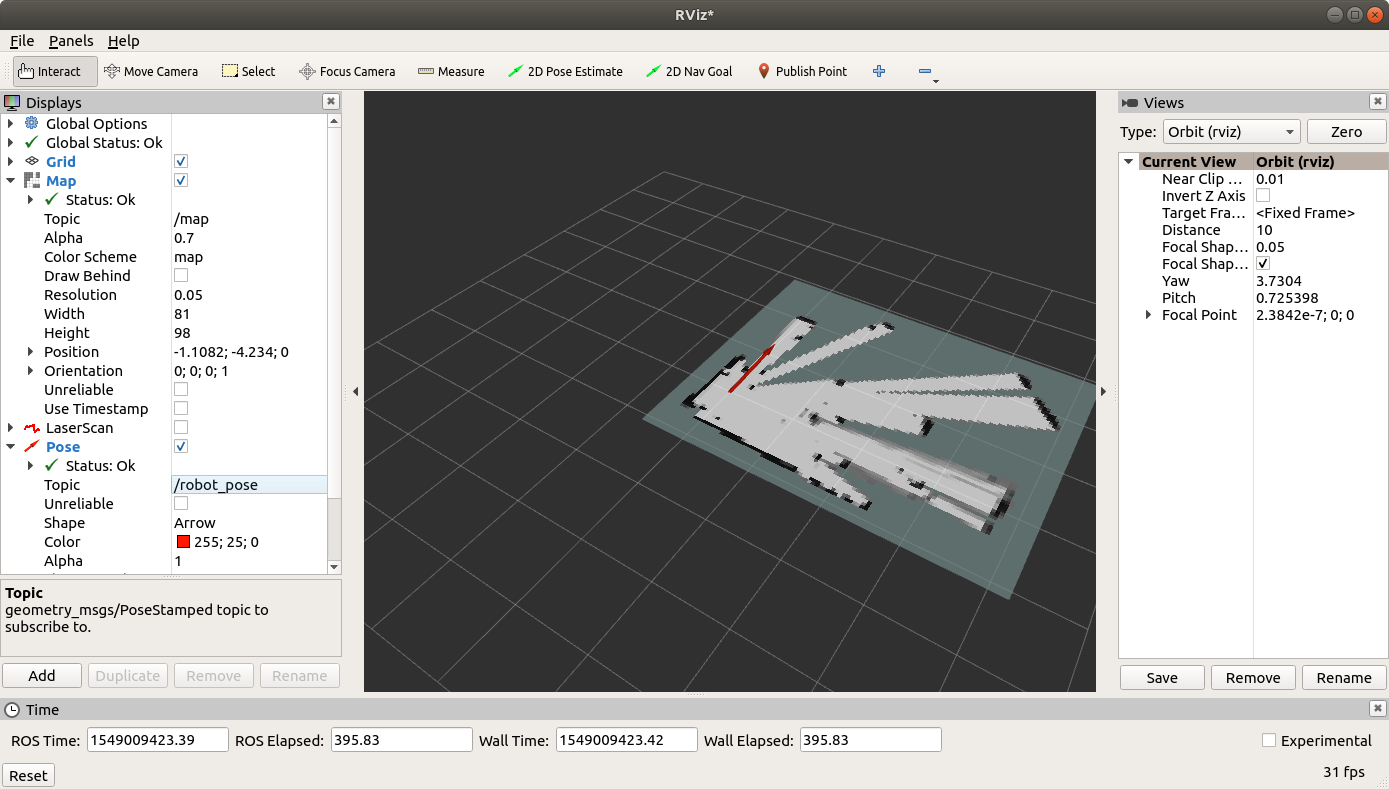](https://ardupilot.org/dev/_images/ros-rviz.png)
[RVIZ](http://wiki.ros.org/rviz) 允许实时查看车辆的本地位置和姿态、激光雷达数据和[制图师的 3D 地图](https://ardupilot.org/dev/docs/ros-cartographer-slam.html#ros-cartographer-slam)。也可以设置本地位置目标,并让ROS的导航库(在ArduPilot的速度控制器的帮助下)将车辆移动到目标。
这些指令在运行[APSync映像](https://ardupilot.org/dev/docs/apsync-intro.html#apsync-intro)并安装了ROS的[Nvidia TX2](https://ardupilot.org/dev/docs/companion-computer-nvidia-tx2.html#companion-computer-nvidia-tx2)上进行了测试,如此[处](https://ardupilot.org/dev/docs/ros-install.html#ros-install)所述。此页面上的一些信息可在以下维基页面上找到:
* [ros.org's NetworkSetup](http://wiki.ros.org/ROS/NetworkSetup)
* [answers.ros.org 的 “How to to Run Rviz remote”](https://answers.ros.org/question/10343/how-to-run-rviz-remotely/)
* [answers.ros.org的“rostopic list有效,但rostopic echo不起作用”](https://answers.ros.org/question/48240/rostopic-list-works-but-rostopic-echo-does-not/)
### 客户端电脑设置[¶](https://ardupilot.org/dev/docs/ros-rviz.html#client-pc-setup)
* 在客户端 PC(rviz 将运行的地方)上安装 ROS“桌面完整”。
* 连接到车辆的wifi接入点(如果使用APSync,则默认用户名/密码为ardupilot/ardupilot)
* 打开命令提示符并检查是否可以“ping”运行 ROS 的配套计算机。如果使用 APSync,这两个命令都应该有效
```
ping 10.0.1.128
ping apsync.local
```
* 使用您喜欢的编辑器打开文件(可能需要使用 sudo),并确保配套计算机出现在列表中。以下是配套计算机运行APSync时应显示的内容`/etc/hosts`
```
10.0.1.128 apsync.local
10.0.1.128 apsync
```
* 在新的命令提示符下,键入以获取客户端电脑的名称`hostname`
* 使用您喜欢的编辑器将以下两行添加到底部`~/.bashrc`
```
export ROS_HOSTNAME=your-host-name.local <--- substitute the client PC's name here
export ROS_MASTER_URI=http://apsync.local:11311
```
### 配套计算机设置[¶](https://ardupilot.org/dev/docs/ros-rviz.html#companion-computer-setup)
* SSH 到配套计算机上。如果使用APsync,则以下内容应该有效(密码为“apsync”)
```
ssh apsync@apsync.local
```
* 使用您喜欢的编辑器将以下行添加到底部`~/.bashrc`
```
export ROS_HOSTNAME=apsync.local
export ROS_MASTER_URI=http://apsync.local:11311
```
### 检查 ROS 数据在客户端上是否可用[¶](https://ardupilot.org/dev/docs/ros-rviz.html#check-ros-data-is-available-on-the-client)
要确认客户端笔记本电脑可以从车辆中检索数据,请尝试以下命令
```
rostopic list
rostopic echo /robot_pose
```
### 启动 rviz[¶](https://ardupilot.org/dev/docs/ros-rviz.html#start-rviz)
* 在客户端 PC 上启动 rviz
```
rosrun rviz rviz
```
* 查看实时激光雷达数据
> * 在显示区域中,选择“添加”,“激光扫描”
> * 添加后,展开“激光扫描”部分并将“主题”设置为“/scan”
* 查看环境地图
> * 选择“添加”、“地图”
> * 添加后,展开“地图”部分并将“主题”设置为“/map”
* 查看车辆的当前航向(根据 ROS)
> * 选择“添加”,“姿势”
> * 添加后,展开“姿势”部分并将“主题”设置为“/robot\_pose”
### 发送位置目标[¶](https://ardupilot.org/dev/docs/ros-rviz.html#sending-position-targets)
* 要允许 ROS 通过 mavros 将位置目标发送到 ArduPilot,请登录运行 ROS 的 Companion Computer 并使用您喜欢的编辑器修改 mavros 的 node.launch 文件(如下所示的 gedit)
```
roscd mavros <-- this assumes mavros has been installed with rosdep
cd launch
sudo gedit node.launch
```
* 添加如下所示的一行并重新启动所有ROS进程后``
```
```
* 布防车辆并切换到引导模式
* 在 rviz 中,单击“2D 导航目标”按钮,然后单击并按住地图上的鼠标按钮以瞄准绿色箭头(这将设置目标位置和最终姿态),然后释放鼠标按钮
* 地面站应显示飞行器正在移动的目标位置(任务规划器在目标位置放置一个绿色标记,并从车辆上向目标绘制一条橙色线)
如果一切未按预期进行,以下命令可能有助于诊断问题
* `rostopic info /move_base_simple/goal`应将发布者显示为“rviz”,将订阅者显示为“mavros”
* `rostopic echo /move_base_simple/goal`应在设置“2D 导航目标”后的瞬间显示“位置”和“方向”
* `rosrun rqt_graph rqt_graph`显示了 ROS 节点及其连接的图形图
---
# Agent Instructions
This documentation is published with GitBook. GitBook is the documentation platform designed so that both humans and AI agents can read, navigate, and reason over technical content effectively. Learn more at gitbook.com.
## Querying This Documentation
If you need additional information that is not directly available in this page, you can query the documentation dynamically by asking a question.
Perform an HTTP GET request on the current page URL with the `ask` query parameter:
```
GET https://yuelan-icus-organization.gitbook.io/pei-tao-ji-suan-ji/ros/cong-rviz-fa-song-ming-ling.md?ask=
```
The question should be specific, self-contained, and written in natural language.
The response will contain a direct answer to the question and relevant excerpts and sources from the documentation.
Use this mechanism when the answer is not explicitly present in the current page, you need clarification or additional context, or you want to retrieve related documentation sections.