飞行控制器和配套计算机时钟可以使用MAVLink的SYSTEM_TIMEarrow-up-right和TIMESYNCarrow-up-right消息进行同步。这一点很重要,这样每一端都可以将来自另一端的数据混合到其 EKF 中。
mavros的sys_time插件arrow-up-right实现了mavros/ROS端
ArduPilot的AP_RTCarrow-up-right库实现了ArduPilot端
可以修改Mavros的apm_config.yamlarrow-up-right文件以配置SYSTEM_TIMEarrow-up-right和TIMESYNCarrow-up-right消息的速率。以下是推荐的设置。
conn: timesync_rate: 10.0 system_time_rate: 1.0 time: timesync_mode: MAVLINK
默认情况下,飞行控制器的时间是从GPS设置的,但可以从三个源之一(GPS,MAVLINK,机载硬件时钟)使用BRD_RTC_TYPESarrow-up-right参数作为时间同步源的位掩码进行设置。使用 mavros set = 2 时,仅允许使用 SYSTEM_TIMEarrow-up-right MAVLINK 消息的“MAVLINK_SYSTEM_TIME”源。BRD_RTC_TYPES
BRD_RTC_TYPES
如果消息显示在 Mavros 控制台中(最常在使用 ArduRover 时),则应增加 SCHED_LOOP_RATEarrow-up-right 参数。这是因为如果往返时间超过 10 毫秒,Mavros 会忽略 TIMESYNC 消息。RTT too high for timesync
RTT too high for timesync
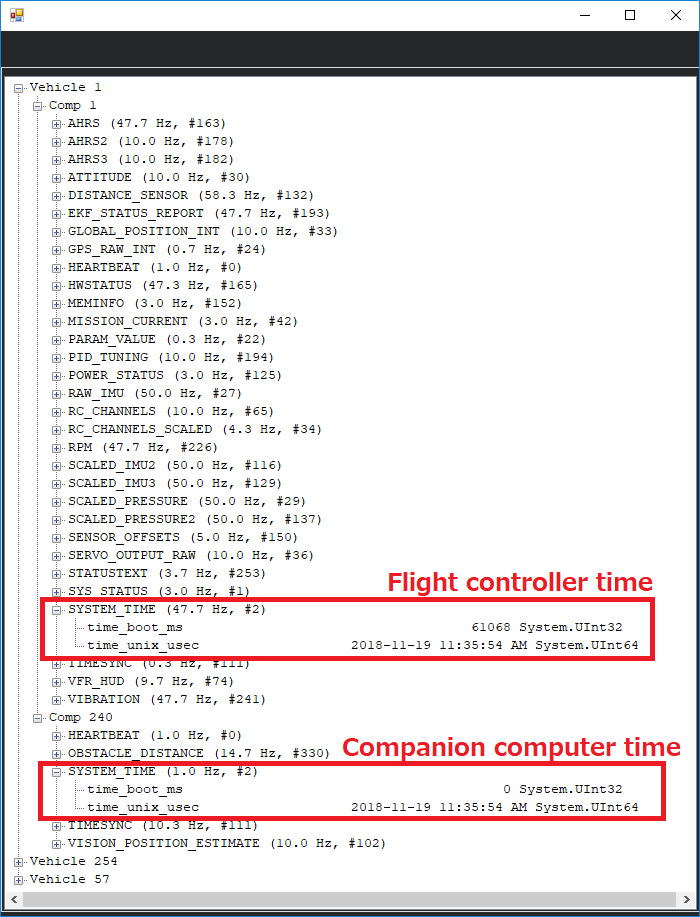
MAVLink 检查器(可通过 QGC 或 MissionPlanner 使用)来检查系统时间是否同步。如果使用任务规划器,请按 Ctrl-F 并按“MAVLink 检查器”按钮。
arrow-up-right
Last updated 2 years ago