将数据从AP发送到ROS/mavros
从接入点到 ROS 的数据¶
内存单元数据¶
检查和设置数据速率¶
rostopic echo /mavros/imu/data <-- to see the data itself
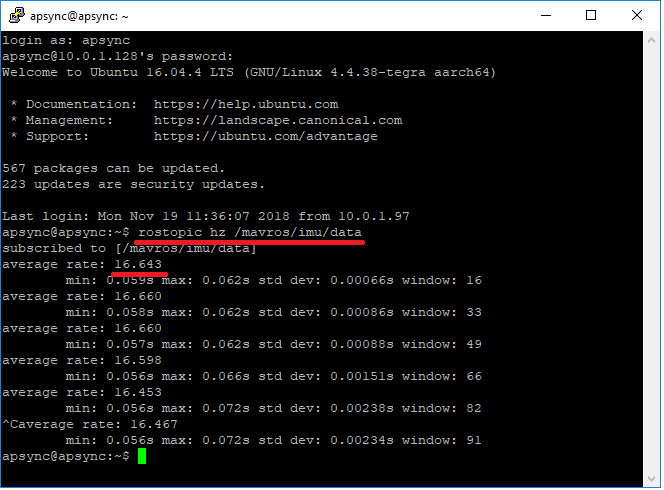
rostopic hz /mavros/imu/data <-- to view the update raterosrun mavros mavsys rate --all 10 <-- to set the data rate for all data to 10hz
rosrun mavros mavsys rate --extra1 10 <-- to set the data rate for IMU_RAW to 10hz
rosrun mavros mavsys rate --help <-- to see help on this commandLast updated