物体回避
用于物体避让的 ROS¶
配套计算机设置¶
ssh apsync@apsync.localroscd mavros <-- this assumes mavros has been installed with rosdep
cd launch
sudo gedit node.launch开始ap_navigation¶
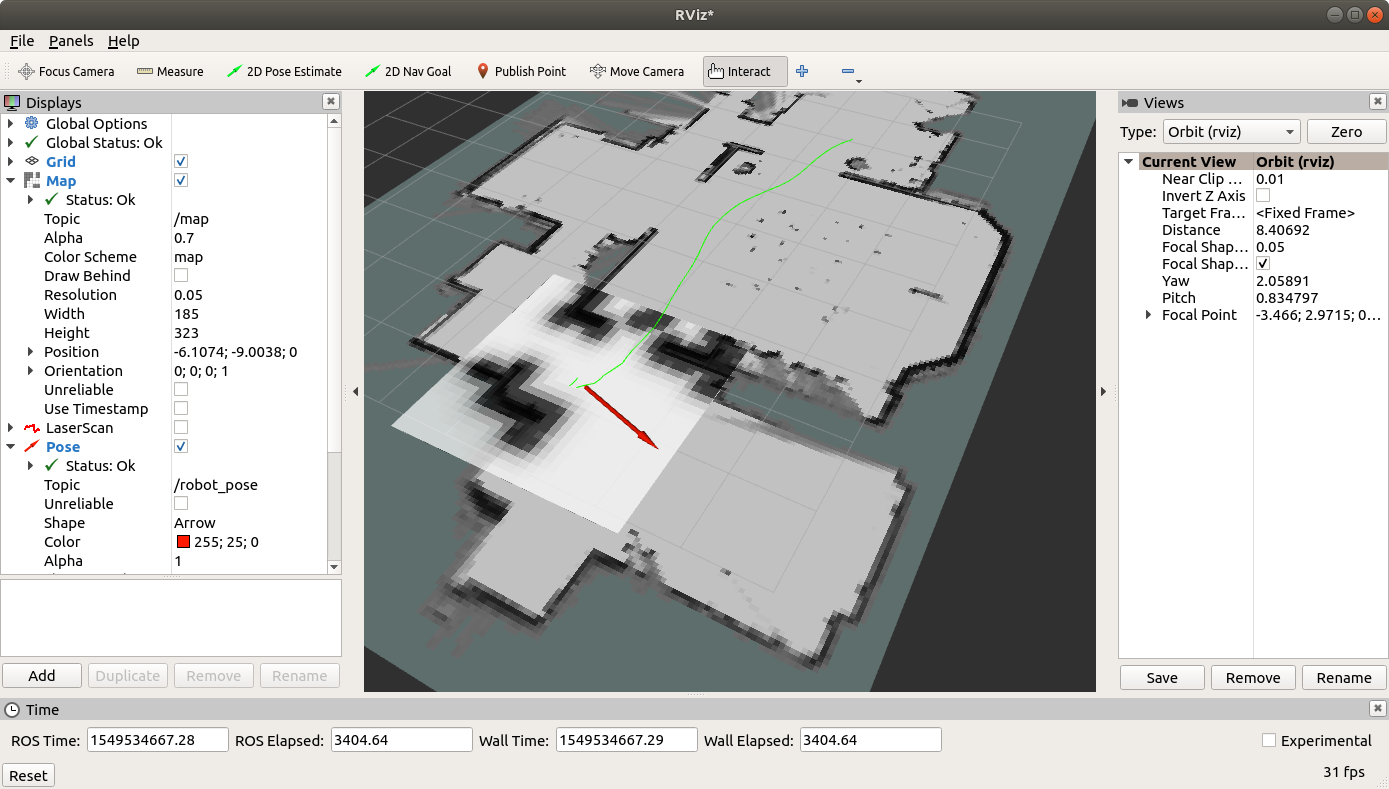
发送位置目标¶
Last updated
<remap from="/mavros/setpoint_velocity/cmd_vel_unstamped" to="/cmd_vel" />sudo apt-get install ros-kinetic-navigationcd ~/catkin_ws/src
wget https://github.com/ArduPilot/companion/raw/master/Common/ROS/ap_navigation.zip
unzip ap_navigation.zipcd ~/catkin_ws
source devel/setup.bash
catkin buildcd ~/catkin_ws
source devel/setup.bash
roslaunch ap_navigation ap_nav.launch