> For the complete documentation index, see [llms.txt](https://yuelan-icus-organization.gitbook.io/pei-tao-ji-suan-ji/llms.txt). Markdown versions of documentation pages are available by appending `.md` to page URLs; this page is available as [Markdown](https://yuelan-icus-organization.gitbook.io/pei-tao-ji-suan-ji/ros/yong-yu-fei-gps-dao-hang-de-he-ke-tuo-slam.md).
# 用于非 GPS 导航的赫克托 SLAM
## 用于非GPS导航的ROS和Hector SLAM[¶](https://ardupilot.org/dev/docs/ros-slam.html#ros-and-hector-slam-for-non-gps-navigation)
本页介绍如何使用 [RPLidarA2 激光雷达](http://wiki.ros.org/rplidar)设置 ROS 和 [Hector SLAM](http://wiki.ros.org/hector_slam),为 ArduPilot 提供本地位置估计,以便它可以在没有 GPS 的情况下运行。
这些指令在用[APSync](https://ardupilot.org/dev/docs/apsync-intro.html#apsync-intro)闪存的[NVidia TX2](https://ardupilot.org/dev/docs/companion-computer-nvidia-tx2.html#companion-computer-nvidia-tx2)上进行了测试,然后[按照此处所述安装了](https://ardupilot.org/dev/docs/ros-install.html#ros-install)ROS和MAVROS。
他们还在[RaspberryPi 3 B +](https://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html#raspberry-pi-via-mavlink)上进行了测试,并安装了ROS和MAVROS,如此[处所述](https://ardupilot.org/dev/docs/ros-install.html#ros-install)。
注意
这些页面正在进行中
### 安装 RPLidar 和 Pixhawk[¶](https://ardupilot.org/dev/docs/ros-slam.html#mounting-the-rplidar-and-pixhawk)
[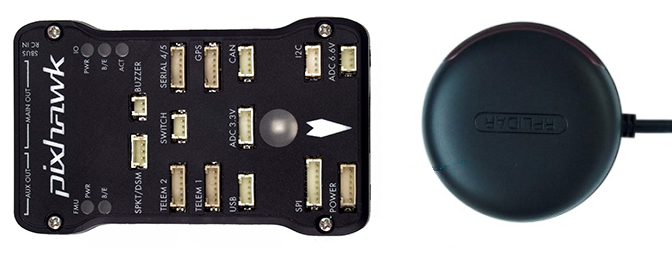](https://ardupilot.org/dev/_images/ros-pixhawk-rplidara2-orientation.png)
RPLidar 的方向应使其 USB 电缆线指向与飞行控制器上的箭头相同的方向。
USB 电缆应插入运行 ROS 的配套计算机上的 USB 端口。
### 检查 RPLidar 的串行端口[¶](https://ardupilot.org/dev/docs/ros-slam.html#check-the-rplidar-s-serial-port)
* 将 RPLidarA2 插入配套计算机。如果使用安装在AUVidea J2板上的TX120,请确保激光雷达已插入较低的USB端口。
```
ls -l /dev/tty*
```
* 激光雷达应显示为 /dev/ttyUSB0 或 /dev/ttyACM0。
* 如果您键入“lsusb”,则设备还应列为“Cygnal Integrated Products, Inc. CP210x UART Bridge / myAVR mySmartUSB 灯”
* 允许任何人通过输入以下两个命令之一从设备读取,具体取决于上面找到的串行端口
```
sudo usermod -a -G dialout $USER
```
### 安装更多软件包[¶](https://ardupilot.org/dev/docs/ros-slam.html#install-more-packages)
* 将 ROS 桌面安装完整:
```
sudo apt-get install ros-kinetic-desktop-full
```
* 或者安装这些单独的软件包中的每一个(此列表尚未完成):
```
sudo apt-get install ros-kinetic-tf ros-kinetic-tf-conversions ros-kinetic-laser-geometry
sudo apt-get install ros-kinetic-cv-bridge ros-kinetic-image-transport
sudo apt-get install qt4-qmake qt4-dev-tools
sudo apt-get install protobuf-compiler
```
### 创建卡特金工作区[¶](https://ardupilot.org/dev/docs/ros-slam.html#create-a-catkin-workspace)
在您的主目录中:
```
cd $HOME
mkdir -p catkin_ws/src
cd catkin_ws
catkin_init_workspace
```
### 安装 RPLidar 节点和 Hector SLAM[¶](https://ardupilot.org/dev/docs/ros-slam.html#install-rplidar-node-and-hector-slam)
在工作区中安装 RPLidar 节点和 Hector SLAM 软件
```
cd $HOME/catkin_ws/src
git clone https://github.com/Slamtec/rplidar_ros.git
git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
```
使用您喜欢的编辑器打开Hector SLAM的启动文件,该文件可以在$HOME/[catkin\_ws/src/hector\_slam/hector\_mapping/launch/mapping\_default.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_mapping/launch/mapping_default.launch)中找到,并修改“base\_frame”,“odom\_frame”并注释掉“tf”行,如下所示:
```
```
编辑 Hector SLAM 的 hector\_imu\_attitude\_to\_tf/launch/example.launch 文件,该文件位于 [$HOME/catkin\_ws/src/hector\_slam/hector\_imu\_attitude\_to\_tf/launch/example.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_imu_attitude_to_tf/launch/example.launch),并通过将“thumper\_imu”替换为“/mavros/imu[/](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_imu_attitude_to_tf/launch/example.launch)data”来更改它以消耗来自飞行控制器的 IMU 数据(通过 mavros),使其如下所示:
```
```
编辑 Hector SLAM 的 tutorial.launch 文件,该文件位于 [$HOME/catkin\_ws/src/hector\_slam/hector\_slam\_launch/launch/tutorial.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_slam_launch/launch/tutorial.launch),并将“use\_sim\_time”行更改为如下所示:
```
```
继续编辑 [tutorial.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_slam_launch/launch/tutorial.launch) 并添加一个新行(就在现有包含行的正下方),以便包含上面修改的 [example.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_imu_attitude_to_tf/launch/example.launch) 文件:
```
```
默认情况下,一旦启动,Hector SLAM 将弹出一个窗口以实时显示地图,但这可以通过注释掉 [tutorial.launch](https://github.com/tu-darmstadt-ros-pkg/hector_slam/blob/catkin/hector_slam_launch/launch/tutorial.launch) 文件的一行来禁用,使其如下所示:
```
```
### 构建包[¶](https://ardupilot.org/dev/docs/ros-slam.html#build-the-packages)
```
cd $HOME/catkin_ws
catkin build
source devel/setup.bash
```
### 启动赫克托·斯拉姆[¶](https://ardupilot.org/dev/docs/ros-slam.html#start-hector-slam)
将RPLidarA2插入配套计算机,然后打开四个终端,每种终端类型:
```
cd catkin_ws
source devel/setup.bash
```
然后在 1 号航站楼:
```
roscore
```
在 2 号航站楼:
```
roslaunch rplidar_ros rplidar.launch
```
在终端 3 中(对于 RaspberryPi,我们建议在[另一](http://wiki.ros.org/ROS/Tutorials/MultipleMachines)台机器上运行它这里解释):
```
roslaunch hector_slam_launch tutorial.launch
```
在 4 号航站楼:
按照[与 ROS 连接页面上](https://ardupilot.org/dev/docs/ros-connecting.html#ros-connecting)的说明启动 mavros,其中涉及运行如下命令:
```
roslaunch mavros apm.launch fcu_url:=udp://:14855@
```
### 配置 ArduPilot[¶](https://ardupilot.org/dev/docs/ros-slam.html#configure-ardupilot)
使用地面站(即任务规划器)连接到飞行控制器,并检查是否设置了如下所示的参数:
* [AHRS\_EKF\_TYPE](https://ardupilot.org/copter/docs/parameters.html#ahrs-ekf-type) = 2(默认值)使用 EKF2(在编写此页面时,EKF3 尚不支持外部仓位估计)
* [EK2\_ENABLE](https://ardupilot.org/copter/docs/parameters.html#ek2-enable) = 1(默认值)
* [EK3\_ENABLE](https://ardupilot.org/copter/docs/parameters.html#ek3-enable) = 0(默认值)
* [GPS\_TYPE](https://ardupilot.org/copter/docs/parameters.html#gps-type) = 0 禁用 GPS
* [EK2\_GPS\_TYPE](https://ardupilot.org/copter/docs/parameters.html#ek2-gps-type) = 3 以禁用 EKF 对 GPS 的使用
* [COMPASS\_ENABLE](https://ardupilot.org/copter/docs/parameters.html#compass-enable) = 0,[COMPASS\_USE](https://ardupilot.org/copter/docs/parameters.html#compass-use) = 0,[COMPASS\_USE2](https://ardupilot.org/copter/docs/parameters.html#compass-use2) = 0,[COMPASS\_USE3](https://ardupilot.org/copter/docs/parameters.html#compass-use3) = 0 禁用 EKF 对指南针的使用,而是依赖 ROS 和 Hector SLAM 的航向
更改上述任何值后,重新启动飞行控制器。
如果一切正常,视觉位置估计应该开始从ROS流入ArduPilot。这可以通过使用任务规划器(或类似工具)连接到飞行控制器并检查飞行数据屏幕的消息选项卡(左下角)来确认来自 EKF 的消息,如下所示:
```
EKF2 IMU1 initial pos NED = 0.0,0.0,0.0 (m)
EKF2 IMU1 is using external nav data
EKF2 IMU0 initial pos NED = 0.0,0.0,0.0 (m)
EKF2 IMU0 is using external nav data
```
使用任务规划器(或类似工具)转到“飞行数据”屏幕,右键单击地图,然后选择“在此处设置主页”>>“设置EKF原点”。车辆应立即出现在您单击的地图上。
### 视频[¶](https://ardupilot.org/dev/docs/ros-slam.html#video)
注意
我们热衷于改进ArduPilot对ROS的支持,因此如果您发现问题(例如似乎不支持的命令),请在[ArduPilot问题列表中](https://github.com/ArduPilot/ardupilot/issues)报告它们,标题包含“ROS”,我们将尝试尽快解决这些问题。