本节包含有关创建任务的文章,这些任务将在战车切换到自动arrow-up-right模式时运行。
arrow-up-right
注意
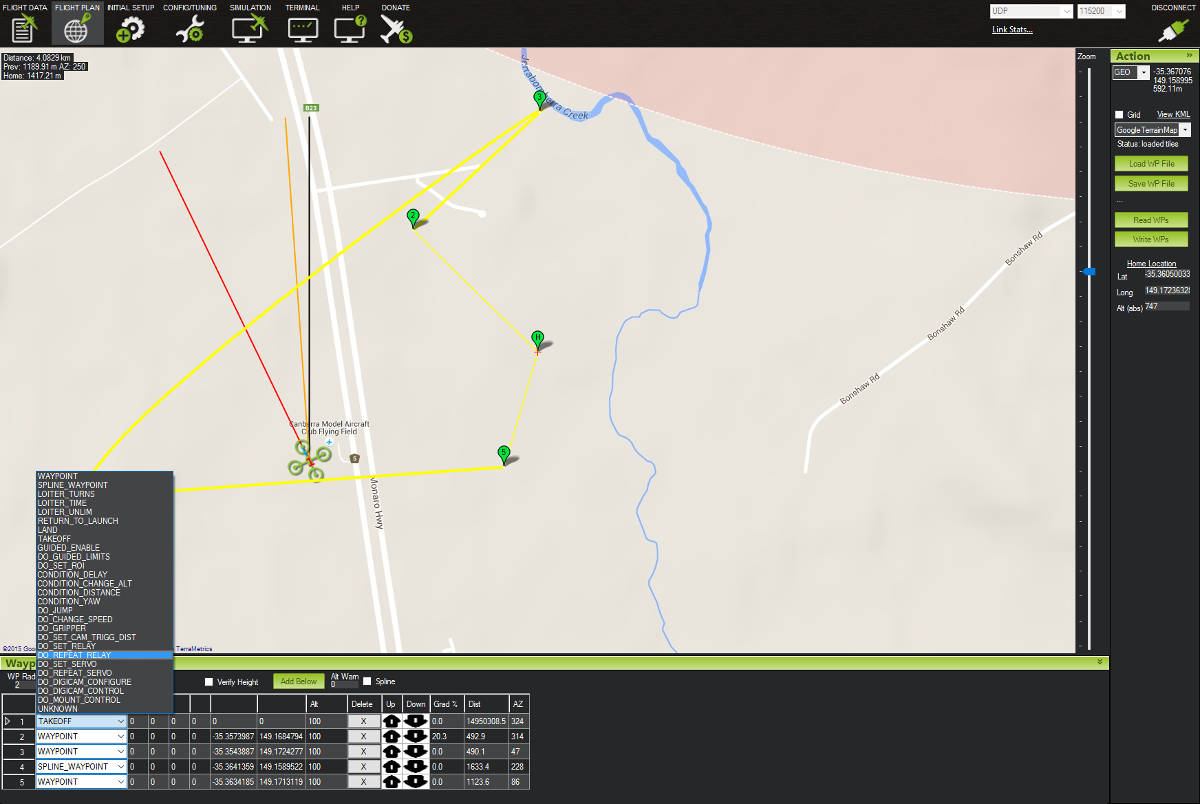
说明侧重于任务规划器arrow-up-right,但主要概念也适用于其他地面控制站arrow-up-right
使用航点和事件规划任务arrow-up-right
直升机任务指挥列表arrow-up-right
任务指挥列表arrow-up-right
自动任务中的摄像机控制arrow-up-right
集结点arrow-up-right
使用任务规划器对图像进行地理标记arrow-up-right
地形跟随arrow-up-right
恢复时快退arrow-up-right
着陆后继续任务arrow-up-right
Last updated 2 years ago