直升机四轴飞行器
直升机四轴飞行器(可变螺距多旋翼飞行器)¶
ArduPilot支持HeliQuads,也称为Collective Pitch Quadboards或Variable Pitch Multicopters。

注意
直升机四轮摩托车需要一架传统的直升机作为基础固件。它可从固件服务器下载。当Copter被编译时,它现在可以生成传统的直升机和多旋翼固件。
这些车辆在 4 个转子中的每一个上都使用独立控制的集体变桨,单个电动机通过皮带和扭矩管以相同的速度为所有 4 个转子提供动力。 它是高度特技飞行的,能够倒置飞行,但可能会遭受高振动水平。
在哪里购买¶
WLtoys Assassin V383可从零售商处购买,包括 WLtoys.eu
连接和配置¶
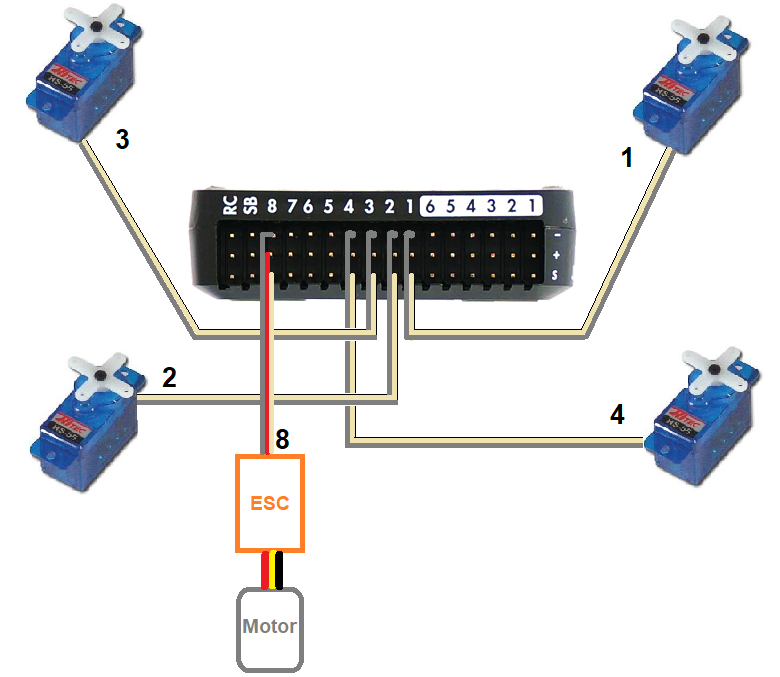
如果使用WLToys Assassin V383,则可以在此处找到参数文件,该文件可用于立即设置所有参数。 对于其他构建,这些是应该设置的标准参数:
FRAME_CLASS至13(直升机四轮)
FRAME_TYPE 到 1(如果右前电机逆时针旋转,则为“X”)或 3(如果右前电机顺时针旋转,则为“H”)
与传统直升机类似,辅助开关应设置为“电机联锁”以打开/关闭电机。通常这是通道 8,因此您可以将RC8_OPTION设置为 32。
视频¶
倒飞测试
堪培拉无人机图片

Last updated