三轴飞行器
三轴飞行器配置¶
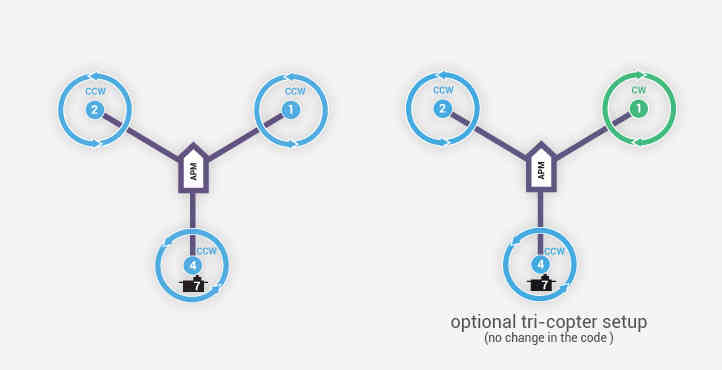
本页概述了获得三轴飞行器所需的特殊设置 飞行。设置多旋翼飞行器的更一般说明应 用于设置的所有其他方面。
加载固件后,请设置:
FRAME_CLASS 至 7(“三”)
与早期版本相比,RC输入和输出参数的更好分离也导致了一些变化。以下是三轴飞行器特定参数的完整列表:
MOT_YAW_SV_ANGLE:尾部伺服的最大倾斜角度(以度为单位)。这允许根据后电机的倾斜角度适当调整后电机的推力。默认值为 30 度。“0”表示尾部伺服器只能直接指向上方(不允许飞行器飞行),“90”表示尾部伺服器可以水平指向。
SERVO7_MIN:尾部伺服在绑定发生前的最低PWM值。
SERVO7_MAX:尾部伺服在绑定发生前的最高PWM值。
SERVO7_TRIM:尾部伺服器的PWM值接近防止尾部旋转所需的PWM值。
SERVO7_REVERSED:尾部伺服的反向设置。0 = 伺服沿默认方向移动,1 表示反向移动。
通过将适当的SERVOX_FUNCTION设置为 7,可以将用于尾部伺服的 RC 输出通道从其默认值(通道 39)更改为 6。 例如,Pixracer 只有 5 个输出通道,因此通过将SERVO5_FUNCTION设置为 39,可以将尾部伺服移动到输出通道 <>。 请注意,如果更改了输出通道,则必须为新的输出通道正确设置SERVOx_MIN、SERVOx_MAX、SERVOx_TRIM和SERVOx_REVERSED。
Last updated