基本系统概述
ArduPilot 操作的简单概述¶
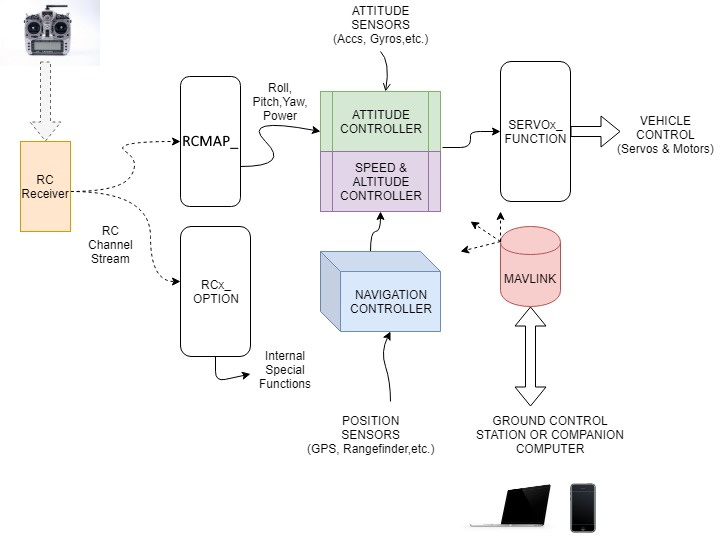
这是对自动驾驶仪上运行的ArduPilot固件功能的非常基本的概述。下面显示的是基本功能操作的简单框图。这将使您在配置系统时更好地了解ArduPilot的基本功能。
基本目标¶
该软件的基本目标是提供对车辆的控制,无论是自主的,还是通过无线电控制发射器或地面控制站的飞行员输入,或通过车辆上的配套计算机,其中任何一个都是可选的,包括仅在车辆上加载完全自主的任务执行。
输入¶
控制输入由无线电控制接收器输入,或通过遥测或配套计算机的 MAVLink 通信输入。无线电控制接收器提供横滚/俯仰/偏航输入,用于所需的姿态控制、车辆功率(油门)以及操作模式和辅助功能的控制。横滚/俯仰/偏航/油门的无线电控制输入可以通过这些功能分配给任何无线电控制通道。辅助函数是使用参数分配的。RCMAP_xRCx_FUNCTION
输出¶
提供输出以激活伺服、电机、继电器等。来控制车辆。任何自动驾驶仪输出都可以通过参数分配所需的车辆控制输出功能。请注意,输出不一定对应于任何RC输入,除非它们的函数设置为RCPassThru。SERVOx_FUNCTION
传感器¶
姿态、位置、动力系统监控和车速由自动驾驶仪的传感器输入提供。所有与ArduPilot兼容的自动驾驶仪都至少集成了一个或多个加速度计,气压仪和陀螺仪。 通常需要GPS,并且通常需要指南针传感器。通常这些是外部提供的。 一些控制器具有多个传感器实例以实现冗余,这是ArduPilot软件的关键功能。许多传感器需要在强制硬件设置步骤中进行一次性校准。
Last updated