无线电控制校准
本文介绍如何使用任务规划器执行无线电控制校准
概述¶
RC发射器允许飞行员设置飞行模式,控制飞行器的运动和方向,还可以打开/关闭辅助功能(即升降起落架等)。
RC校准涉及捕获每个RC输入通道的最小,最大值和“修剪”值,以便ArduPilot可以正确解释输入。
检查变送器的设置¶
确保电池已断开(这很重要,因为在RC校准过程中可能会意外布防车辆)
确保遥控接收器已连接到自动驾驶仪
打开您的RC发射器,如果它有“修剪标签”,请确保它们位于中间
使用 USB 电缆将自动导航仪连接到 PC
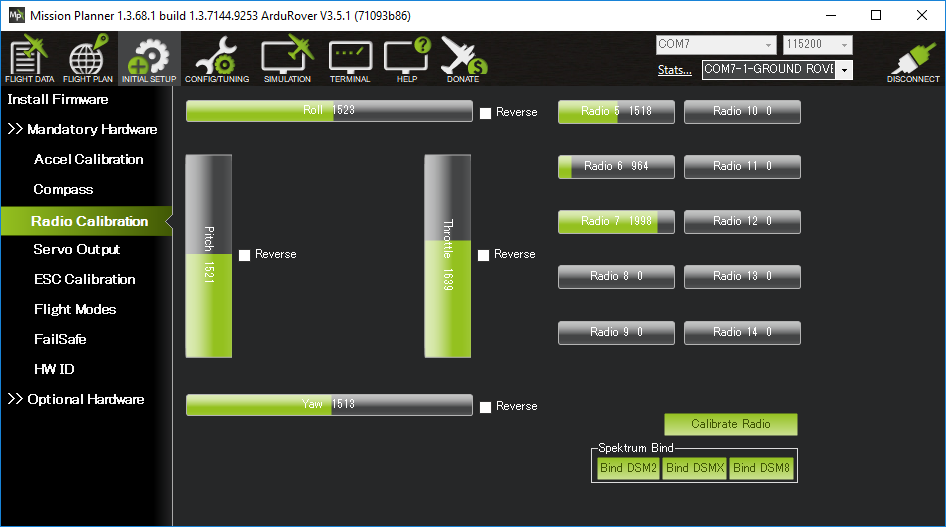
在任务规划器上,按“连接”按钮并打开任务规划器的初始设置 |必需硬件 |无线电校准屏幕
应该出现一些绿色条,表明ArduPilot正在接收来自发射器/接收器的输入。如果没有条形出现,请检查接收器的 LED:
没有指示灯可能表示它未正确连接到自动驾驶仪。查找可能倒置插入的连接器
红色或闪烁的 LED 可能表示您的 RC 发射器/接收器需要绑定。有关说明,请参阅RC设备随附的手册
通过移动摇杆、旋钮和开关并观察哪些(如果有)绿色条移动,检查发射器中的通道映射(即检查哪些输入通道由发射器的摇杆、开关和旋钮控制)。如果这是发射机第一次与ArduPilot一起使用,则可能需要更改发射机的通道映射,通常这是使用其内置配置菜单在发射机本身上完成的。
确定您的发射机是模式 1 还是模式 2(见下文)
滚筒棒应控制通道1
变桨杆应控制通道 2
油门杆应控制通道3
偏航杆应控制通道 4
应设置一个 3 位置开关(用于控制飞行模式)以控制通道 5(如果使用直升机)或通道 8(如果使用漫游车或飞机)。可以通过设置 FLTMODE_CH 参数来移动此通道
在 Copter 上,调谐旋钮应控制通道 6
在 Copter 和 Rover 上,任何剩余的两到三个位置开关都可以设置,通过将辅助功能映射到通道 7 到 12 来控制辅助功能
移动发射机的横滚杆、俯仰杆、油门杆和偏航杆,并确保绿条沿正确的方向移动:
对于横滚、油门和偏航通道,绿色条应沿与发射器物理摇杆相同的方向移动
对于音高,绿色条应沿与发射器物理摇杆相反的方向移动
如果其中一个绿色条以不正确的方向移动,则反转发射器本身中的通道。如果无法反转发射器中的频道,您可以通过选中“反转”复选框(仅限飞机和漫游车)在ArduPilot中反转频道。如果复选框不可见,则可以通过直接更改RCx_REVERSED参数来反转通道(其中“x”是从 1 到 4 的输入通道)。
校准¶
打开任务规划器的初始设置 |必需硬件 |无线电校准屏幕
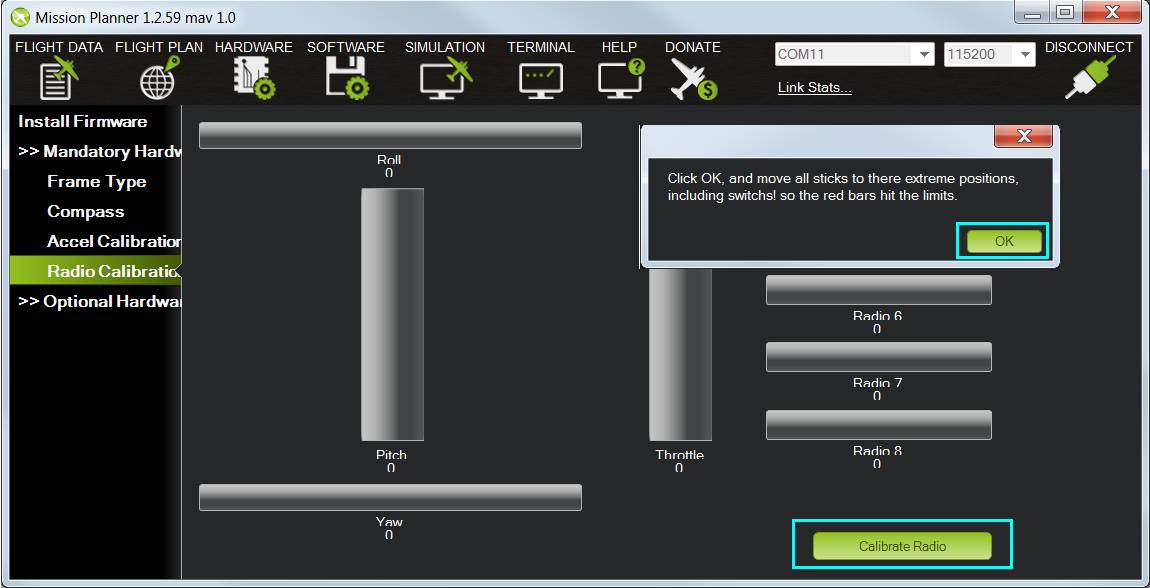
点击右下角的绿色“校准无线电”按钮
当提示检查无线电控制设备是否打开、电池未连接且螺旋桨未连接时,按“确定”

将发射器的控制杆、旋钮和开关移动到其极限。校准条上将出现红线,以显示到目前为止看到的最小值和最大值

选择完成时单击”
将出现一个窗口,提示“确保所有摇杆都居中且油门已关闭,然后单击确定继续”。将油门移至零,然后按“确定”。
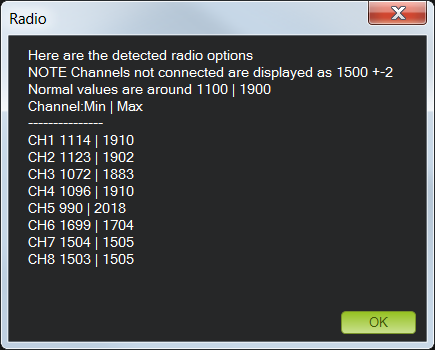
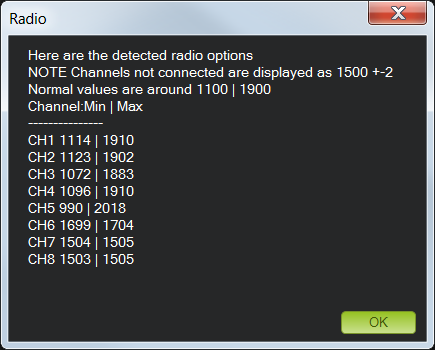
任务规划器将显示校准数据的摘要。最小值约为 1100,最大值约为 1900。

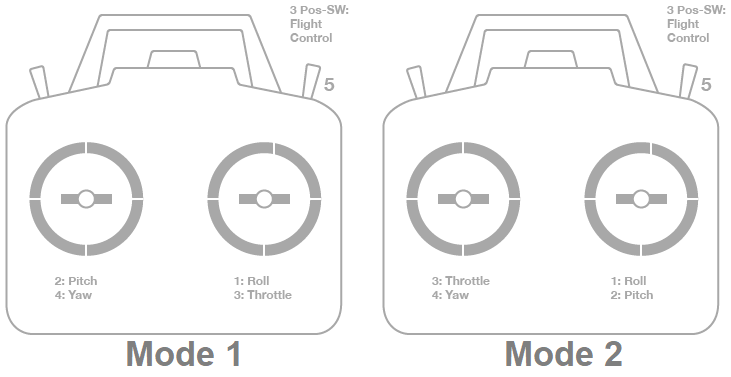
模式 1 和模式 2 发射器¶
有两种主要的变送器配置:
模式1:左摇杆控制俯仰和偏航,右摇杆将 控制油门和侧倾。
模式2:左摇杆控制油门和偏航;正确的棍子会 控制俯仰和滚动。
通道映射¶
平面默认通道映射为:
通道 1:滚动
通道 2:音高
通道 3:油门
通道 4:偏航
频道 8(默认):飞行模式。可以使用FLTMODE_CH参数将模式选择映射到任何RC通道
可以映射未使用的通道以控制其他外设。
延伸阅读¶
横滚、俯仰、油门和偏航通道映射可以使用 RCMAP 输入通道映射进行更改
飞行模式开关设置,用于指定每个开关位置启用的飞行器模式,可在RC发射器飞行模式配置页面上找到
Last updated