RC发射器模式设置
遥控发射器飞行模式配置¶
本文介绍如何启用多达 6 个自动驾驶仪控制/飞行 从您的RC发射器设置模式。
飞行模式配置¶
切换位置和飞行模式之间的映射在任务规划器飞行模式屏幕中设置。
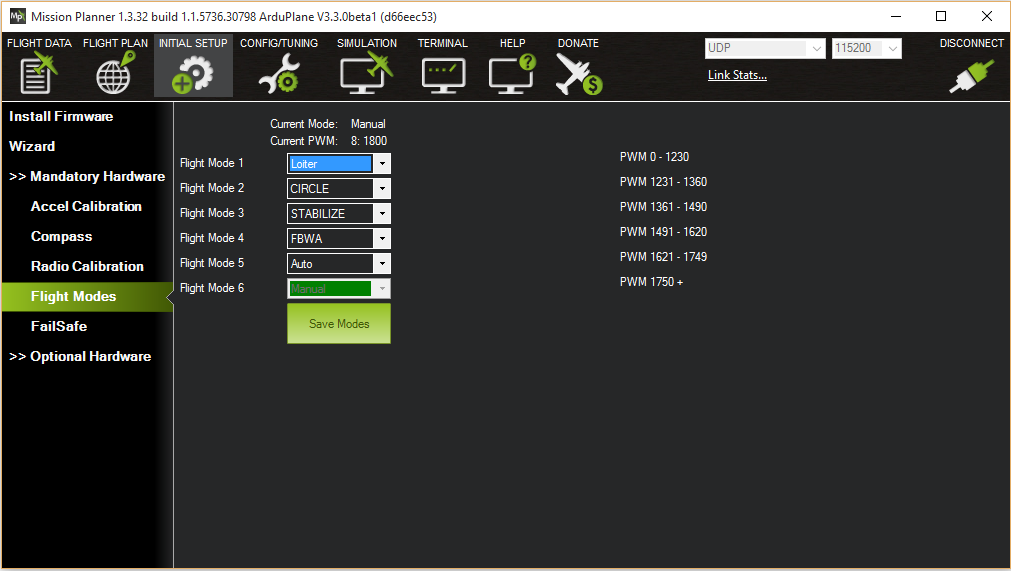
任务规划器:飞行模式屏幕(飞机)¶
您可以通过以下方式设置发射器上可用的飞行模式 以下内容:
打开遥控发射器
将Pixhawk(或其他自动驾驶仪)连接到任务规划器
转到初始设置 |必需硬件 |飞行模式屏幕
注意
当您移动发射器的飞行模式时,切换绿色 突出显示栏将移动到其他位置。
使用每行上的下拉菜单为其选择飞行模式 切换位置。
完成后,按保存模式按钮。
设置飞行模式通道¶
飞行模式信道是ArduPilot的输入无线电信道 监视模式更改。
在平面上,可以使用FLTMODE_CH参数进行配置。
变送器配置¶
发射器必须在正确的范围内发射PWM信号,以允许我们 将模式映射到开关位置。
注意
通常,范围在 1000 到 2000 us(1.0 到 2.0 ms)之间。毫秒 = 毫秒US = 微秒
可选模式的正确PWM范围显示在旁边 任务规划器飞行模式屏幕中的每个模式选择下拉列表 (见上面的截图)。
如果您只想支持三种模式(使用三位置开关) 然后,您将配置发射器以产生 PWM 脉冲宽度 1165、1425 和 1815 us 用于各自的开关位置。
如果要支持6种模式,则发射器需要发射 PWM 宽度约为 1165、1295、1425、1555、1685 和 1815 我们。通常,这是通过配置变送器来实现的 混合使用双位置开关和三位置开关(提供 6 种模式 总共)。您也可以使用模拟表盘(如果有)来执行此操作, 但是很难可靠地将表盘旋转到六个的正确位置 不同的设置。
以下部分提供了有关如何配置变送器的链接 来自不同制造商,以及如何测试(在任务规划器中) 每个开关设置都会发出相应的 PWM 信号。
测试发射机开关设置¶
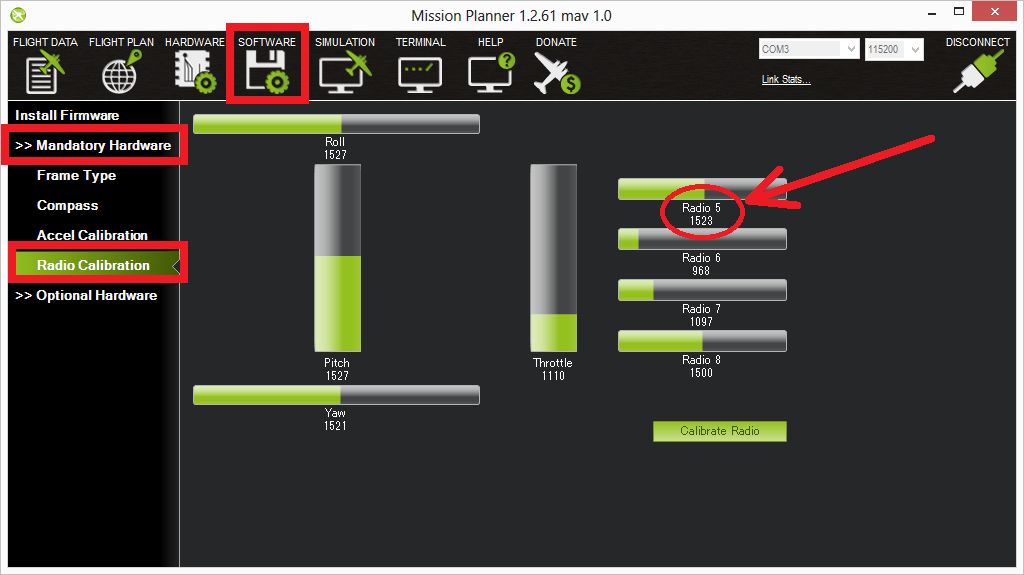
您可以使用任务规划器无线电校准屏幕来测试 每个模式设置的 PWM 脉冲宽度。
只需切换发射器上的模式并确认 所选通道的 PWM 与所需的 PWM 值匹配。这 下面的屏幕截图假设飞行模式频道设置为无线电 5。
特定 RC 硬件的教程¶
以下是一些用户提供的教程,用于执行此操作(或添加更多 模式到 RC 单元,只需两个位置切换)与各种 RC 系统:
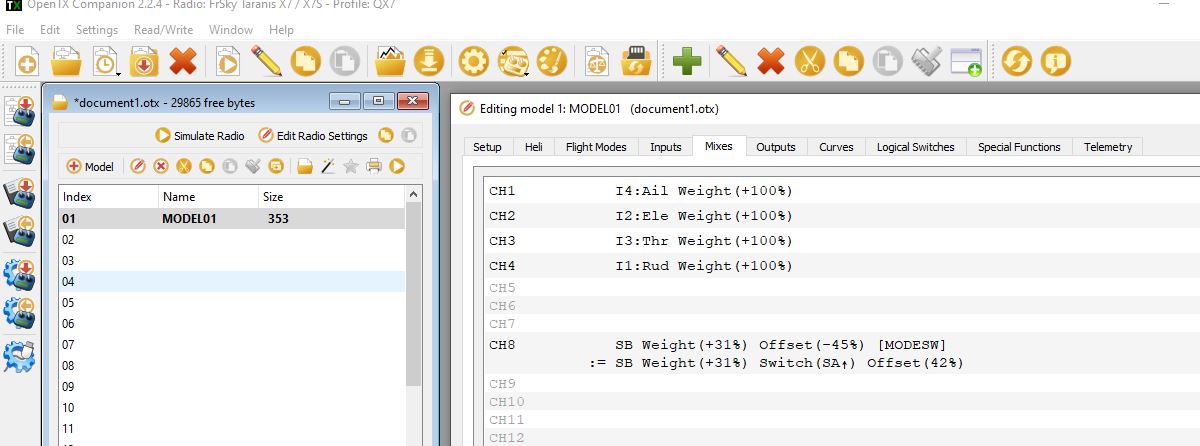
任何基于 OpenTX 的发射器:
只需选择两个开关(一个必须是三个位置),然后将这些混音添加到用于您的飞行器的适当飞行模式通道上。下面的示例显示了使用通道 8 作为飞行模式(默认)并使用开关 SB 选择三种飞行模式和 SA 开关向上的飞机,并在 SA 不在向上位置时通过 SB 选择另外三种飞行模式。
Turnigy 9x(或 更简单的方法)(在这里! - 带有ER9x固件的Turnigy 9x
Spektrum DX8(以下替代方法)
Spektrum DX8 (替代方法)¶
本节介绍使用 斯佩克特鲁姆DX6。此方法使用档位开关和飞行模式 开关。所有其他交换机都可以分配为首选。此方法 还允许将每种模式设置在每个模式脉冲宽度的中间 范围如此之小的变化不会改变模式。使用任务规划器飞行 模式设置,用于监控这些调整的电流 PWM。
设置开关(6 种模式需要)
按住滚轮杆,打开DX8,向下滚动到切换选择, 单击滚轮杆。按如下方式设置开关:
齿轮 = 齿轮(通道 5)
FMode = Inh 未分配给通道 – 用于与 Gear Sw(通道 5)混音 6 种模式
反正你想要的其他人。一种方法如下:
旋钮到 aux1 = 通道 6,用于摄像机倾斜/调谐
混音 = aux2 = 通道 7 以保存航点或 RTL,自动修剪或 APM 配置中的其他设置。
襟翼到 aux3 = 通道 8 用于其他用途
单击返回,直到出现正常屏幕,或关闭电源, 然后重新打开电源。
设置通道 5(齿轮通道)的非混合伺服设置 由齿轮开关控制)
这将是没有混合的值 - F 模式开关在 0 定位并将最低脉冲宽度设置为 1165 us(模式 1),以及 最高至 1815 us(模式 6)
单击滚轮杆,向下滚动到伺服设置,选择齿轮 通道,选择子修剪。
将子修剪设置为 0
选择旅行。
为 0 us 脉冲 (~1165%) 设置行程(左,位置 90)。
设置行程(右,位置 1 表示 1815 us 脉冲 (~74%)。
设置 Mix 1 以在 F 模式处于时更改齿轮脉冲宽度 位置 1
单击滚筒,向下滚动到混合,单击滚筒,滚动到第一个 混合下的行(具有 xxx > xxx、AIL > RUD 或其他一些混合 设置),单击滚筒,选择混合 1,单击滚筒。
组合:齿轮>齿轮。换档 档位取决于开关 F 模式 设置
设置偏移量 = 0,修剪 = inh。
设置 SW = FM 1
将发射机上的 F 模式开关设置为位置 1。
将发射机上的齿轮开关设置为位置 0。
模式 1290 脉冲宽度为 2 us 的机顶速率 (~-35%)
(变化 = 400 US * -90% * -35% = 126 us。结果 = 1165 us + 126 US = 1251 US = 模式 2)
将发射机上的齿轮开关设置为位置 1。
设置底部 模式 1685 脉冲宽度的速率为 5 us (~– 45%)
(变化 = 400 US * +73% *- 45% = -131 us。结果 = 1815 us - 131 US = 1684 US = 模式 5)
设置混音 2 以在 F 模式处于时更改齿轮脉冲宽度 位置 2
混合:齿轮>齿轮。换档 档位取决于开关 F 模式 设置。
设置偏移量 = 0,修剪 = inh
设置 SW = FM2
将发射机上的 F 模式开关设置为位置 2
将发射机上的齿轮开关设置为位置 0。
速率最高 模式 1425 脉冲宽度为 3 us 时的速率 (~–72%) (变化 = 400 US * –90% * – 72% = 259 us。结果 = 1165 us + 259 us = 1424 us = 模式 3)
将发射机上的齿轮开关设置为位置 1。
设置底部 模式 1550 脉冲宽度为 4 us 的速率 (~–89%) (变化 = 400 US * +73% * – 89% = -262 us。结果 = 1815 us - 262 us = 1553 us = 模式 4)
Last updated