BLHeli ESC
BLHeli32 和 BLHeli_S 电调¶
BLHeli固件和配置应用程序的开发是为了允许配置电调并提供附加功能。具有此固件的电调允许配置定时、电机方向、LED、电机驱动频率等。在尝试使用 BLHeli 之前,请按照 DShot 设置说明进行操作。
本页包含以下功能的设置说明
直通支持允许BLHeli应用程序用于配置ESC,同时保持与自动驾驶仪的连接
可逆DShot(又名3D模式)允许电机向任一方向旋转
双向 DShot 允许电调将 RPM 发送回自动驾驶仪,而无需额外的遥测连接
“BLHeli”涵盖多个(有时是竞争的)项目,提供ESC固件和随附的配置软件
BLHeli是最初的开源软件,不再维护,在现代ESC上不可用
BLHeli32是闭源的,基于32位ARM MCU。所有现代 BLHeli 电调都使用 BLHeli32
BLHeli_S是开源的,是16位的。这不再主动维护,但最后发布的版本 16.7 在出厂时默认安装在“BLHeli_S”ESC 上
BLHeli_S JESC 是付费的、闭源软件和 16 位软件,允许它在低端硬件上运行
BLHeli_S BlueJay 是免费的开源软件和 16 位
直通支持¶
直通功能允许使用相应的BLHeliSuite32或BLHeliSuite应用程序(在用户的PC上运行)升级和配置BLHeli32和BLHeli_S电调,同时电调保持与自动驾驶仪的连接。要使用此功能,请按照以下步骤操作
在您的PC上下载并安装BLHeliSuite32(用于BLHeli32 ESC),BLHeliSuite(用于BLHeli_S ESC)或JESC配置器(用于BLHeli_S JESC)
使用USB电缆将PC连接到自动驾驶仪,然后与地面站(例如任务规划器,QGC)连接。
将SERVO_BLH_AUTO设置为 1 可在配置为多旋翼飞行器和四翼飞机的电机(例如 SERVOx_FUNCTION = “电机 1”、“电机 2”等)或油门(例如SERVOx_FUNCTION设置为 70(“油门”)、73(“油门左”)或 74(“油门右”))的所有输出上自动启用直通。对于大多数多旋翼飞行器、四翼飞机和漫游车来说,这将做正确的事情,但对于飞机,设置SERVO_BLH_MASK以在适当的伺服输出上启用直通。
如果你的电脑使用遥测无线电连接到自动导航仪(而不是如上所述使用 USB 电缆),请将SERVO_BLH_PORT设置为连接到遥测无线电的自动导航仪端口。请注意,这并没有指定用于向自动驾驶仪进行ESC遥测反馈的端口!
如果使用安全开关,请确保按下(或通过设置 BRD_SAFETY_DEFLT = 0 将其禁用)。(在较旧的固件版本中)
BRD_SAFETYENABLE断开地面站的连接(但保持 USB 电缆连接)
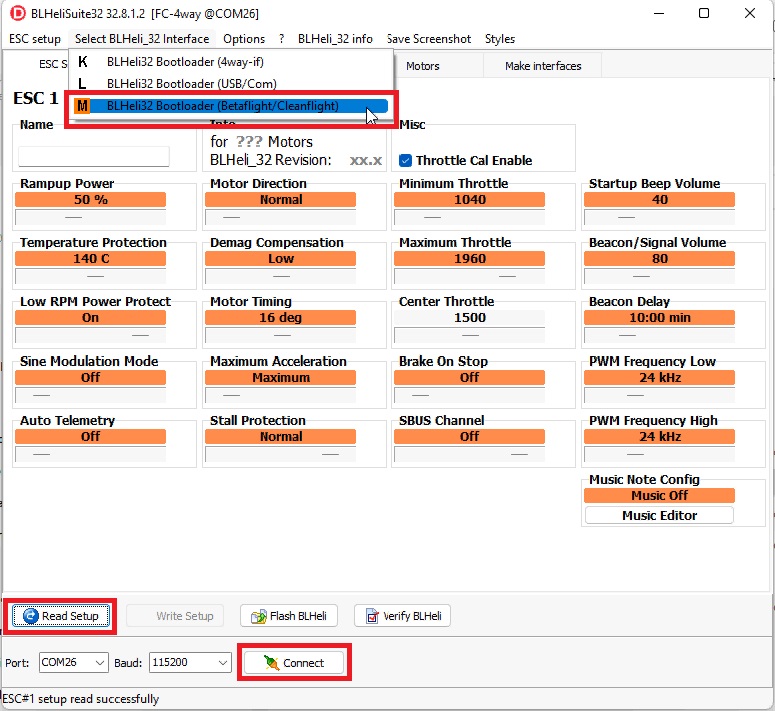
启动ESC配置软件,并通过从界面菜单中选择“BLHeli32引导加载程序(Betaflight/Cleanflight)”连接到自动驾驶仪的COM端口。按“连接”和“读取设置”。您应该能够升级和配置所有连接的电调

注意
ArduPilot固件支持具有最新BLHeli32固件和BLHeliSuite32的直通协议,或仅支持BLHeli_S固件和BLHeliSuite的直通协议。
警告
要使直通正常工作,必须将自动驾驶仪配置为使用 DShot 协议之一。如果您希望最终使用ESC支持的其他协议之一(例如PWM,OneShot125),您仍然可以使用直通配置ESC(例如更改电机方向,设置最小值/最大值等),但最终将自动驾驶仪重新配置为不使用DShot。一旦自动导航仪和电调重新启动,电调应自动检测电调是否不再使用 DShot。
可逆 DShot 电调¶
可逆DShot(又名3D模式)允许电机在任一方向上旋转,这对于具有反向推力的漫游车,船只和飞机非常重要。
目前,仅支持 BLHeli32 和具有 BLHeli_S 功能的可逆 DShot 电调。为了使用一个,驱动它的输出必须在SERVO_BLH_3DMASK位掩码参数中使用适当的位指定。这会将输出 1000-1500-2000 值映射到正确的数字值,以便 ESC 分别提供全反向-空闲-全正向范围操作。
如果启用了DShot命令,则ArduPilot将在SERVO_BLH_3DMASK启动时自动将ESC配置为可逆模式(3D模式)。启用 DShot 命令将允许将其他 DShot 命令发送到由 DShot 设置说明中讨论的 DShot 掩码参数配置为 DShot 的任何其他 ESC。
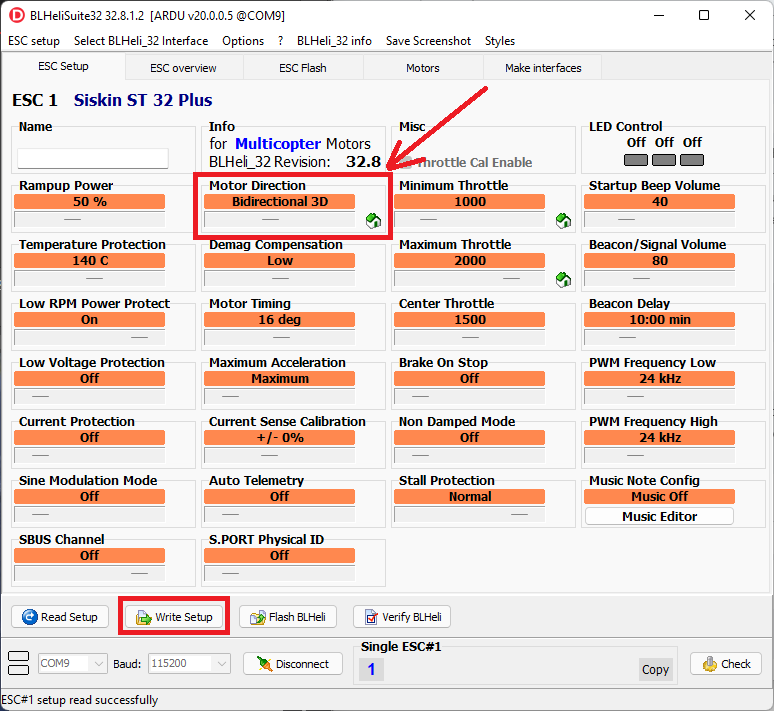
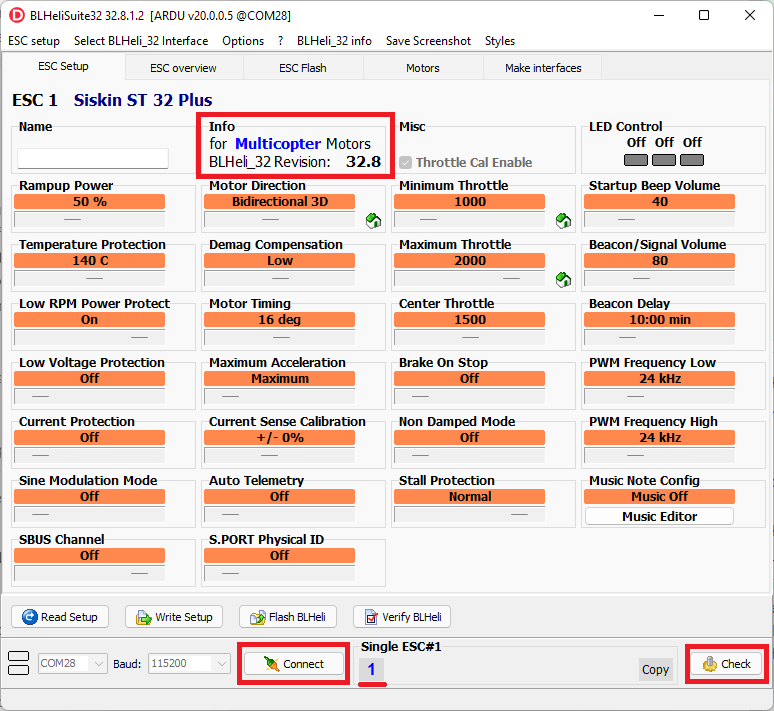
否则,您必须手动将电调的“电机方向”配置为“双向 3D”,如下所示。
注意
目前,ArduPilot仅支持对飞机和漫游车使用可逆电调,不支持直升机。
电调遥测¶
如果 ESC 具有此功能,则允许监视和记录以前需要其他传感器(如电源模块和 RPM 传感器)的性能数据。每个ESC提供的详细数据允许实时决策和单独的ESC或电机性能调整和故障分析。请注意,给定的ESC可能会也可能不会通过遥测传输特定传感器的数据。4合1电调通常提供电压和电流传感器,但不通过遥测传输数据,而是直接连接到自动驾驶仪。有关详细信息,请查看 ESC 数据手册和连接信息。
注意
ArduPilot 目前不支持在非 DShot 协议中通过信号线上的限制空闲消息轮询 ESC 以获取遥测数据。
连接电调遥测线¶
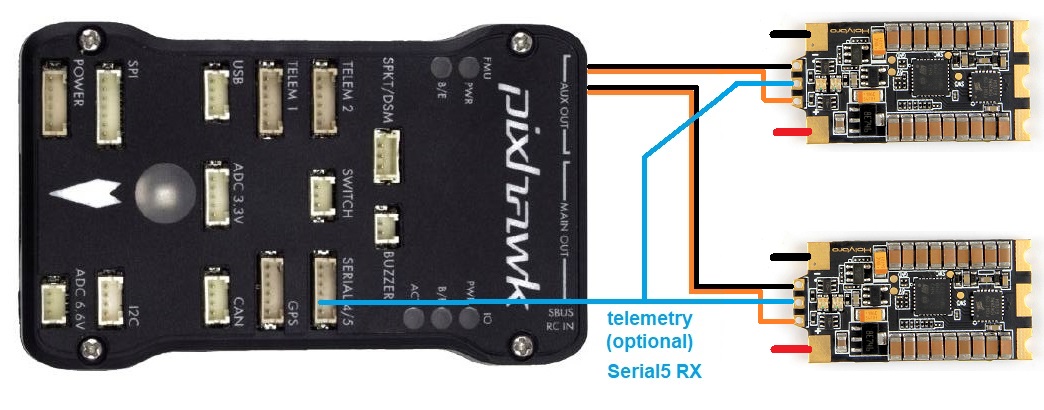
将所有ESC遥测线连接到自动驾驶仪上单个串行端口的RX引脚(上图以Serial5为例)。用于电调遥测的引脚或电线在大多数 BLHeli32 电调上预先焊接。如果电线没有预先焊接,则需要自己焊接。CubePilot串行端口引脚输出可以在这里找到。
设置以下参数以启用 BLHeli32 遥测反馈到自动驾驶仪的串行端口:
SERIALx_PROTOCOL 16(= ESC 遥测),其中“x”是连接到 ESC 遥测线的自动导航仪串行端口号。自动驾驶仪的串行端口编号和UART物理端口之间的映射应记录在此处链接的描述页面中。
SERVO_BLH_TRATE默认为 10,通常不需要更改。这将启用来自 ESC 的 10Hz 更新速率的遥测。如果使用谐波陷波功能,则可以将其提高到100。
SERVO_BLH_POLES默认为 14,适用于大多数无刷电机,通常不需要更改。如果您使用极数不是 14 的电机来计算电调的电场 RPM 的真实电机轴 RPM,请根据需要进行调整。
ESC 遥测日志记录和报告¶
自动驾驶仪一次从一个 ESC 请求状态信息,并在它们之间循环。此信息记录到板载日志的ESCn消息中,并且可以在任何与ArduPilot兼容的日志查看器中查看。
.RPM
电压
当前
温度
总电流
RCOU 消息也会写入板载日志,这些日志包含发送到 ESC 的请求输出电平,表示为 1000(表示停止)到 2000(表示完全输出)的数字。
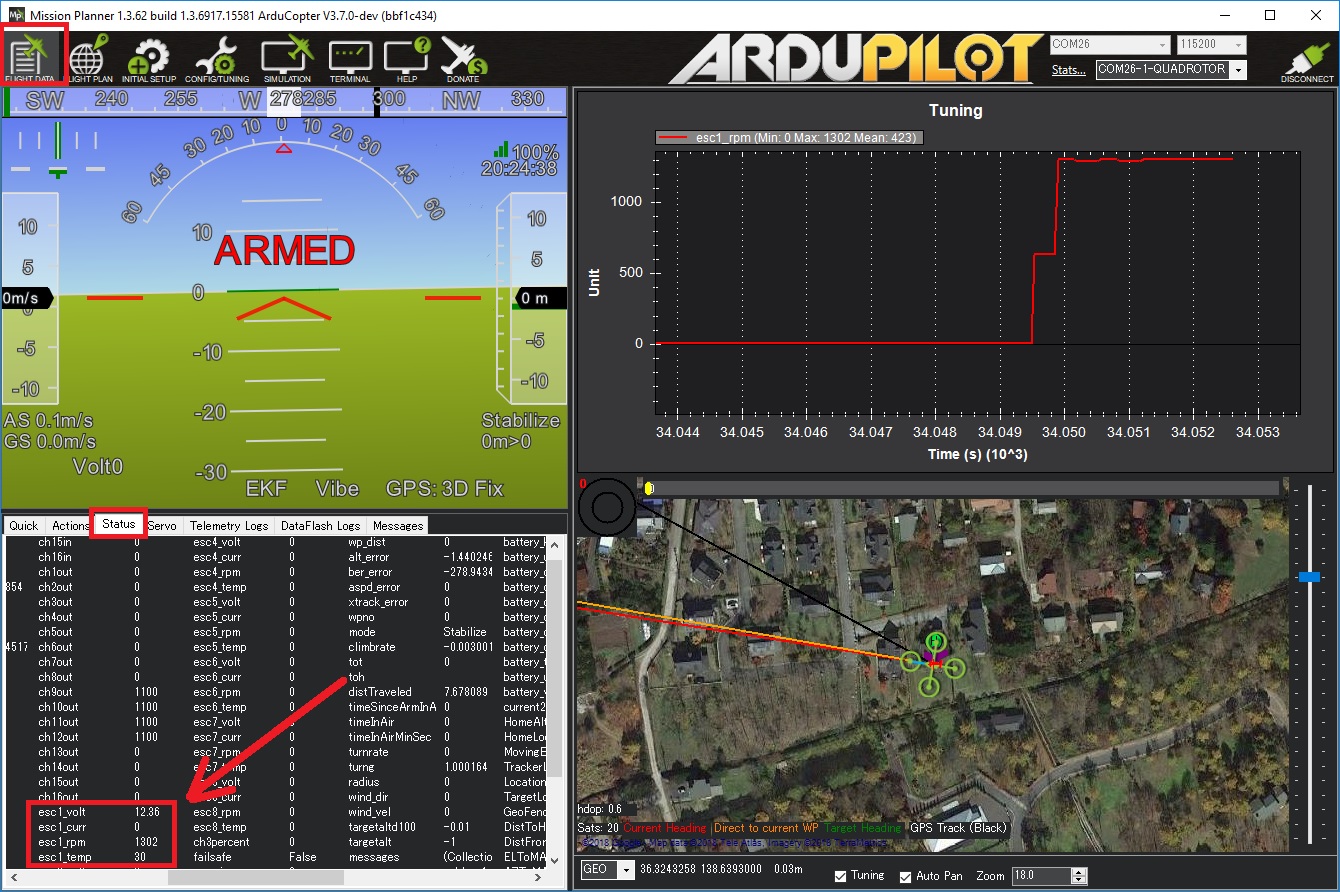
这些数据也可以使用地面站实时查看。如果使用任务规划器,请转到飞行数据屏幕的状态选项卡并查找esc1_rpm。
注意
将 BLHeli32 遥测数据发送到 GCS 需要遥测连接使用 MAVLink2。ArduPilot默认在USB端口上使用MAVLink2,但如果使用另一个端口,则可能需要将SERIALx_PROTOCOL参数设置为2(其中“x”是用于遥测连接的串行端口号)。
此外,如果您的自动驾驶仪有遥测仪,则可以在集成的板载 OSD 上显示一些遥测值。
用作电池监视器¶
通过将电池监视器实例设置为 BLHeli32 ESC 类型(例如 BATT2_MONITOR = 9),所有连接的 BLHeli32 ESC 以及连接到配置的自动导航仪串行端口的遥测接线,都将聚合为单个源。报告的电压将被平均,总计的电流和累积的消耗电流。
双向 DShot¶
较新版本的 BLHeli32(32.7 及更高版本)和 BLHeli_S(16.73 及更高版本)支持通过 DShot 信号线返回电机 RPM 值。支持双向DShot需要独占使用一个或多个DMA通道,因此并非所有版本的ArduPilot都支持它。下面列出了本机支持双向 DShot 的版本。对于其他自动驾驶仪,请加载以“-bdshot”结尾的ArduPilot固件版本。
野兽F7, 野兽F7v2, 野兽H7, 野兽H7v2
飞宇F745, 飞宇F745纳米
KakuteF4Mini, KakuteF7Mini, KakuteH7Mini
只能使用最低的 4 个支持 DShot 的伺服输出。对于带有IOMCU(例如Pixhawk,CubeOrange)的自动驾驶仪,这意味着可以使用AUX1到AUX4。对于Pixracer和其他没有单独IOMCU协处理器的自动驾驶仪,这意味着可以使用输出1到4。
设置¶
首先,请确保您的 ESC 上安装了适当版本的 BLHeli32 或BLHeli_S。大多数 ESC 未预装这些版本。BLHeli32 的官方 7.32 版本支持双向 DShot。BLHeli_S的正式版本不支持双向DShot,您需要从BLHeli_S JESC购买版本或使用BLHeli_S BlueJay。如果您尝试使用错误的固件版本启用双向 DShot,则可能会出现不可预测的电机操作。
设置以下参数以启用 BLHeli32 并BLHeli_S双向 DShot:
SERVO_BLH_BDMASK:用于启用 BLHeli32 或BLHeli_S双向 DShot 支持的位图。在没有IOMCU的自动驾驶仪上,这通常设置为15,以指示四个活动通道。在带有 IOMCU 的自动驾驶仪上,可以将其设置为 3840 以指示四个活动的 AUX 通道(双向 DShot 仅适用于 AUX 输出)。
SERVO_BLH_POLES默认为 14,适用于大多数无刷电机,通常不需要更改。如果您使用极数不是 14 的电机来计算 ESC 的电场 RPM(小型电机可能有 12 个极),请根据需要进行调整。
Last updated