引导加载程序更新
更新引导加载程序¶
引导加载程序是一小段代码,在自动驾驶仪打开电源时运行(通常只有几秒钟)。引导加载程序的主要职责之一是允许轻松升级主固件(即ArduPilot)。
几乎所有自动驾驶仪都预装了引导加载程序,大多数用户永远不需要升级它,但升级到最新的ArduPilot特定引导加载程序有一些优势:
错误修复,如 Copter-4.0.4、Plane-4.0.6 中包含的“参数重置”问题修复
COM 端口名称可能更容易识别。例如,它可能包括“ArduPilot”
警告
更新引导加载程序可能会使开发板“变砖”(即使其无响应且无法上传新固件)。注意不要在更新过程中关闭自动驾驶仪的电源
在哪里可以下载最新的引导加载程序?¶
ArduPilot特定的引导加载程序包含在ArduPilot固件中,但默认情况下处于休眠状态。必须向主 ArduPilot 固件发送特殊命令才能安装新的引导加载程序。
使用任务规划器升级¶
将最新版本的 ArduPilot 安装到自动驾驶仪(使用现有的 ArduPilot 固件,没有现有的 ArduPilot 固件))
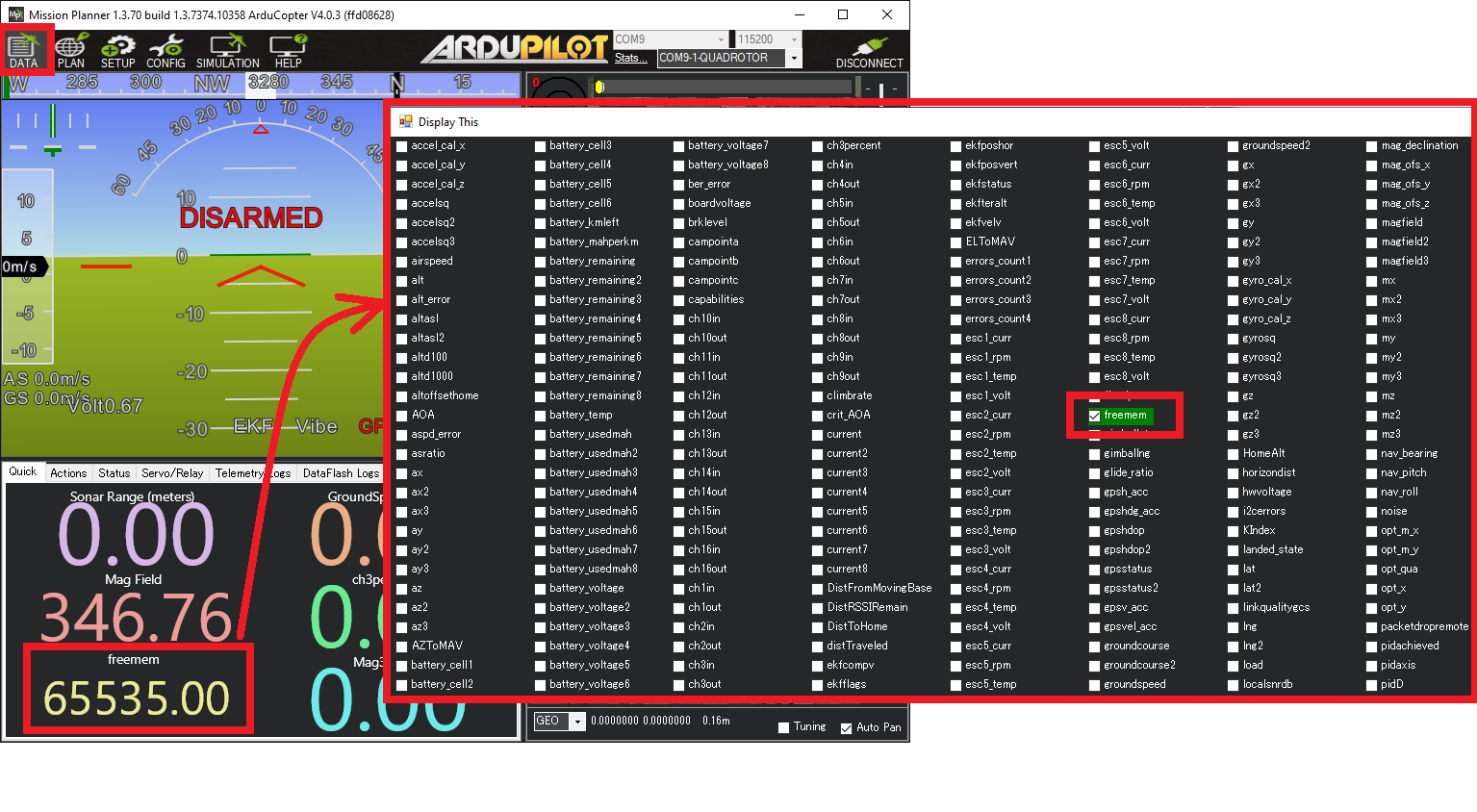
连接并检查自动驾驶仪是否至少有 20k 的可用内存。打开数据屏幕的快速选项卡,双击任何条目并选择“freemem”。

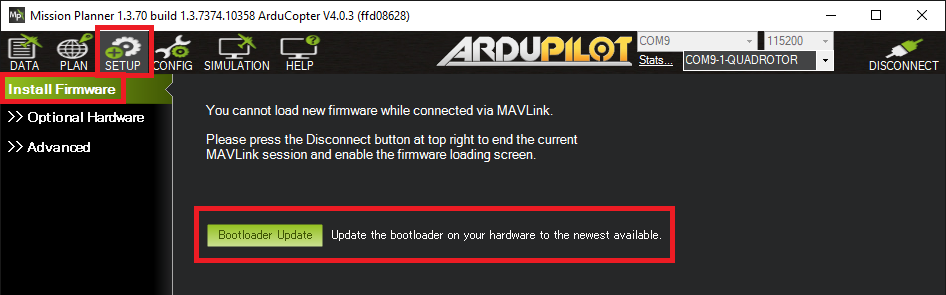
打开设置>>安装固件页面,然后按“引导加载程序更新”按钮

重新启动自动驾驶仪
使用 QGC 升级¶
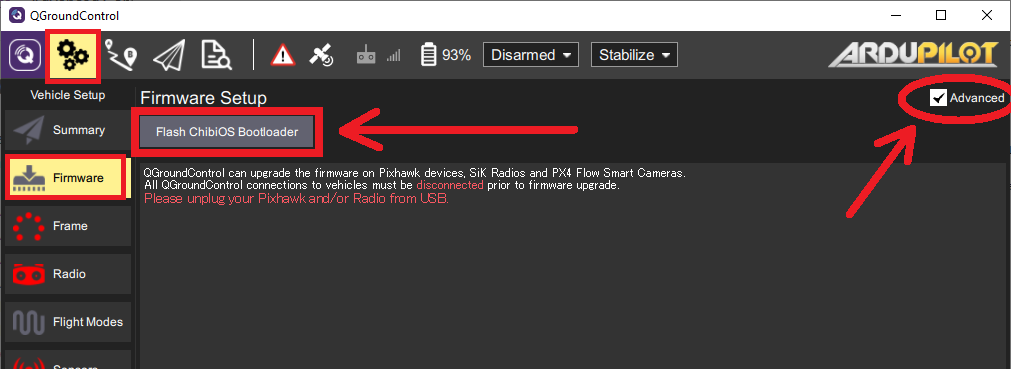
该过程类似于使用Mission Planner(见上文),除了“Flash ChibiOS引导加载程序”按钮位于固件页面的配置(齿轮图标)上。
使用 MAVProxy 升级¶
在 MAVProxy 终端中,键入“flashbootloader”
额外信息¶
有关引导加载程序的开发人员特定信息可在此处找到
引导加载程序的源代码可以在工具/AP_Bootloader中找到
可以在 firmware.ardupilot.org/Tools/Bootloaders 上找到预编译的二进制文件
Last updated