限流和电压调节
限流和电压调节¶
直升机包括电流限制,以保护电池免受 损坏和电压缩放,以补偿压降,因为 电池电量耗尽。这两个功能都需要车辆具有 电源模块或其他电压和电流监视器。
注意
在 Copter 中引入了电流限制和电压缩放 3.3.
限流¶
这种保护会自动将油门降低到低至 60% 全油门以限制从电池请求的电流。 这对于保护电池免受损坏很有用。
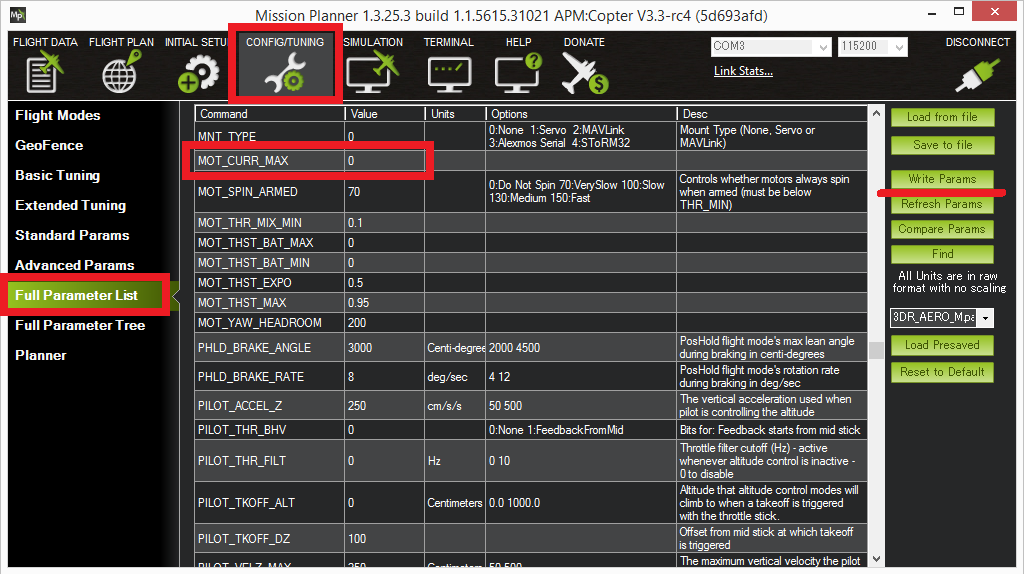
要启用该功能,请将MOT_BAT_CURR_MAX参数设置为所需的 以安培为单位的限制(或“0”表示禁用此功能)。
如果测量的电流超过此限制,则最大油门将为 在 1 到 5 秒内降低到安全水平(取决于超过多远 极限)。因为可以在短时间内超过限制 时间,限制应设置在电池爆裂之间的某个地方 限制及其绝对上限。
电压调节¶
如果启用,此功能将增加横滚、俯仰和偏航控制 增益,用于补偿电池耗尽时的压降。这 有助于确保车辆的姿态控制 不会随着电池的减弱而退化。
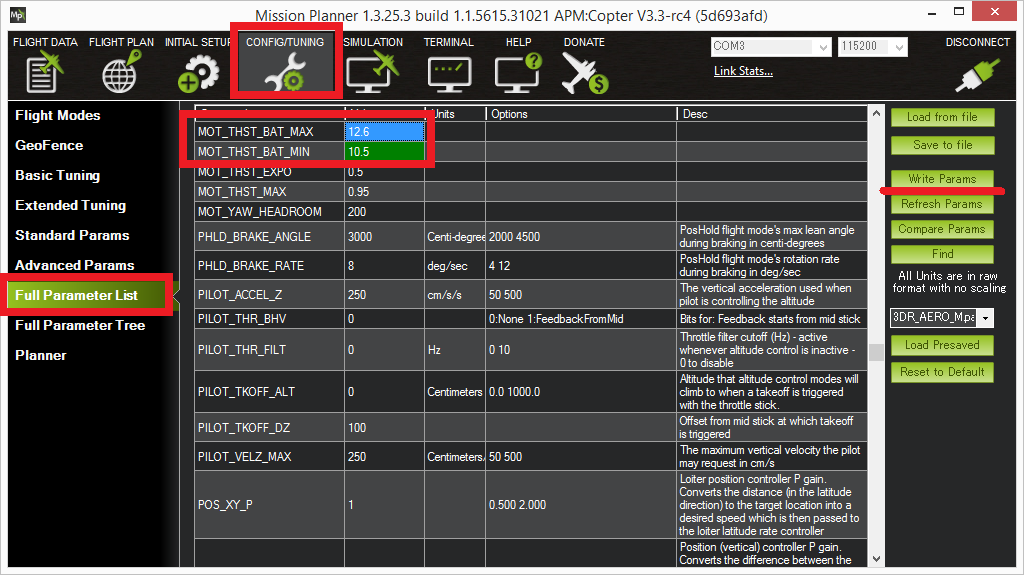
要启用,请将MOT_BAT_VOLT_MAX设置为电池的完全充电 电压(即 12S 电池为 6.3)。收益将按比例调整以尝试 以保持充满电时的姿态控制响应。
将MOT_BAT_VOLT_MIN设置为车辆将达到的最小电池电压 通常经验。收益将不再扩大,因为 电压低于此水平。将其设置为电池故障保护电压是一个良好的开端。
Last updated