自动调谐
使用自动调谐自动调谐¶
为您的飞机获得一组良好的横滚/俯仰调整参数是 对于稳定、准确的飞行至关重要。为了帮助解决这个问题,这是高度的 建议您使用下面描述的自动调谐系统。
自动调谐的作用¶
自动调谐模式是一种飞行模式,其飞行方式与FBWA相同, 而是利用飞行员输入的飞行姿态变化来学习关键 滚动和俯仰调整的值。所以飞行员使用他们的发射器 模式切换到自动调谐模式,然后驾驶飞机飞行 几分钟。飞行时,飞行员需要输入尽可能多的尖锐 尽可能改度,以便自动调谐代码可以学习如何 飞机回应。
设置自动调谐¶
要将飞机设置为自动调谐,您需要选择自动调谐模式为 可通过飞行模式开关选择的飞行模式之一 发射机。
您还可以在 ACRO 模式下自动调谐偏航轴,以便在 ACRO 模式下进行偏航速度控制,方法是将 YAW_RATE_ENABLE = 1 和ACRO_YAW_RATE设置为等于或小于车辆偏航角速率能力的值(典型值为 90 度/秒)。当然,这假设飞行器具有偏航控制面(例如,只有飞翼的升降机没有)。
注意
您可以在大多数稳定的飞行模式下自动调谐,例如 CRUISE 或 FBWA/B、LOITER,甚至在自动任务航段(如果启用了 STICK_MIXING)期间,通过设置为 107 的开关。RCx_OPTION
警告
大型四翼飞机可能很难手动飞行,同时监控 GCS 的调整进度消息,或者如果您没有在飞行员引导模式下飞行的经验。在这些情况下,在自动执行重复固定航向任务(例如矩形环路)或徘徊时进行调谐更安全,使用上述 RC 辅助开关启用自动整定,而不必不断引导车辆在路线上。
AUTOTUNE_AXES位掩码选择在自动调谐中将调整的轴。默认值为滚动、俯仰和偏航。
您还应该通过在地面站的高级参数屏幕中设置 AUTOTUNE_LEVEL 参数来选择调谐级别。AUTOTUNE_LEVEL参数控制您希望调音的激进程度 是。默认值为 6 级,它产生中等曲调,适用于 初级到中级飞行员。如果您是更有经验的飞行员 然后你可以选择7级,这将导致更清晰的调音 (更快的姿态变化)。不建议高于 7 的水平,直到你 已经完成了较低级别的初始曲调。高于 8 的水平应该只 由非常有经验的飞行员使用。
注意
在偏航角速率控制器处于活动状态的情况下,在自动调谐模式下转弯将需要使用方向舵,而不仅仅是副翼输入。如果您没有方向舵,请不要启用YAW_RATE_ENABLE。
自动调谐在每个AUTOTUNE_LEVEL调谐FF(前馈)、P、I和D项,确定用于调谐过程的最大/目标压摆率以及从所需姿态角到所需角速率(PTCH2SRV_TCONST和RLL2SRV_TCONST)的增益。
重要的是要为飞机实际可以达到的速率设置适当的水平。 特别是,对于翼展较大的慢速飞机来说,6级的横滚率可能太大, 就像滑翔机一样。这些通常具有每秒 30 - 40 度的最大滚动速率,应使用 2 级或 3 级。有关费率,请参阅AUTOTUNE_LEVEL设置。但 8 级可能适用于 2 公斤以下级别的轻质泡沫飞机。
注意
PTCH2SRV_RMAX_UP率、PTCH2SRV_RMAX_DN率和RLL2SRV_RMAX率应根据飞行器的能力适当设置,以便正常飞行。
您还需要确保所有基本设置都适合您的 机身是正确的。特别是,确保所有表面反转 是正确的,并且您为最小值设置了合理的值 空速。自动调谐不会执行任何操作,直到您超过最小值 您在ARSPD_FBW_MIN参数中设置的空速。如果你不这样做 有一个空速传感器,那么仍然使用该值,以及一个 来自其他传感器的空速估计。还要确保您已完成 RC 校准,因为AUTOTUNE只有在您完全控制的情况下才能工作 使用发射棒移动。
此外,ArduPilot将自动调整调整增益与空速,无论是测量的还是估计的(如果没有使用空速传感器),以补偿控制面有效性与速度。标称中心速度SCALING_SPEED,应设置为将用于调谐的近似速度,即典型的巡航速度。使用此速度设置完成调谐后,不要更改它,因为它会直接缩放增益并会损坏调谐。
要检查的其他事项:
如果您安装了空速传感器,请确保它正常工作并已校准。请参阅空速校准部分。
检查您的重心,确保根据飞机手册正确无误。一般来说,多一点更安全
鼻子比尾巴重。
检查表面修剪。建议在阅读SERVO_AUTO_TRIM选项的文档后使用该选项。
确保故障保护设置设置正确。尝试在飞机在地面上关闭发射器(并移除螺旋桨或确保安全),并检查飞机的反应
设置一个集结点,以便在家以外的安全场所进行RTL
确保针对伺服速度正确设置了PTCH_RATE_SMAX和RLL_RATE_SMAX参数。请参阅极限循环检测。如果这些设置得太低,那么曲调将受到影响。
在自动调谐中飞行¶
完成所有设置后,您就可以开始以自动调谐模式飞行了。您可以 在自动调谐模式下起飞,或在另一种模式下起飞并切换 一旦你获得高度,就会自动调谐。
当您使用自动调谐模式时,会发生一些事情:
自动调谐系统将立即为 您的最大滚动和俯仰 速率和角度误差与要求的速率增益。这些值取决于AUTOTUNE_LEVEL
自动调谐系统将监控您所需的横滚和俯仰速率 (由您的发射棒运动决定)。当 要求的横滚或俯仰速率(如果YAW_RATE_ENABLE = 1,则偏航率)超过ref:AUTOTUNE_LEVEL<AUTOTUNE_LEVEL>设置的最大调整目标轴速率的40%,(不是摇杆偏转)自动调整系统将使用飞机的响应来学习调整值。因此,需要剧烈的摇杆运动,在每个方向上中等到最大的摇杆偏转处略微停顿。
自动调谐系统将在轴的调谐完成后保存 P 和 D 参数。当您退出自动调谐模式时,将保存 FF 和 I 值。在调整轴的过程中切换出自动调谐会将 PID 值恢复为其原始值。
如果从滚动和俯仰的默认参数开始 当您第一次进入时,您可能会发现飞机非常迟钝 自动调谐。你会发现,随着曲调的进行,这将得到 更好。确保您的飞行区域有足够的空间进行长时间慢速 转弯。
成功的自动调谐的关键是输入快速滚动或俯仰 使用发射杆移动。最好一次只执行一个轴,尽管调整在所有正在调整的轴上同时进行,因此调整消息可能偶尔交错。
因此,每个轴依次使用快速摇杆运动和每次偏转时短暂停,直到在 GCS 或 OSD 上报告调谐完成消息。
如果初始调整值太低,则应注意 当您在自动调谐中飞行时,飞机的响应速度会逐渐提高 模式。
当获得所需的感觉和响应能力、发生振荡或在轴上变得“抽搐”时,停止增加连续自动调谐会话的AUTOTUNE_LEVEL。
不要太早停止¶
如果您无法使用 GCS 或 OSD 监控调谐进度,建议您在每个轴上至少执行 20 次快速移动,最好更多。在所有轴完成调整之前停止将导致飞机飞行不良。在自动调谐模式下继续飞行和锻炼摇杆,远远超过您认为飞机正在飞行的点 井。
调整轻型、敏捷的飞机¶
非常轻巧、敏捷的飞机可能无法完成调音,或者导致曲调振荡小,通常在俯仰轴上,因为它的惯性很低。在这些情况下,执行以下操作并重新尝试自动调谐可能会有所帮助:
增加主回路速率,SCHED_LOOP_RATE到“200”(Hz),并将ONESHOT_MASK设置为控制飞行表面控制舵机的输出(如果它们能够进行 200Hz 更新......大多数数字舵机都能够做到这一点...检查它们在您移动它们时是否过热)。这提高了控制更新速率并减少了延迟,增加了相位裕量,以尝试消除小振荡并提高精度。
将INS_GYRO_FILTER设置为“40”(Hz)截止,并将PTCH_RATE_FLTT和RLL_RATE_FLTT增加到“20”(Hz)以减少延迟并增加相位裕量。
注意
增加陀螺仪滤波器截止可能会允许更多的系统噪声进入控制回路,建议设置动态油门陷波滤波器或飞行中FFT(如果您的自动驾驶仪固件包含此功能......请参阅:固件限制)。
ACRO 模式偏航速率控制器¶
从版本 4.2 开始,ArduPilot 提供了使用偏航速率控制器的选项,其行为方式与俯仰和横滚控制器相同,但对于由方向舵杆控制的偏航轴,假设车辆具有方向舵控制面。
若要启用此功能,请将YAW_RATE_ENABLE设置为 1。启用后,ACRO_YAW_RATE参数可用于调整 ACRO 模式下舵杆完全偏转时所需的最大偏航角速率。
该控制器可以采用与俯仰轴和横滚轴相同的方式进行自动调谐,并在同一会话中使用方向舵控制杆产生 AUTOTUNE 使用的快速偏航需求。
注意
在启用此控制器的情况下自动整定时,横滚输入也会导致偏航输出,从而允许在偏航控制器处于活动状态的情况下进行更协调的转弯。这通常会导致同时调谐偏航控制器和横滚控制器,但不一定会在横滚调谐完成后完成偏航调谐。此外,在具有大偏航权限的车辆的滚动调谐中,最初可能会应用看似过多的方向舵,直到曲调进行。
自动调谐级别 0¶
这是一个特殊的级别,它不会改变速率或时间常数(即RLL2SRV_RMAX或PTCH2SRV_TCONST),而是针对这些参数的当前值调整 FF/P/I/D。例如,当俯仰在比滚动更低的AUTOTUNE_LEVEL水平上不稳定时,这可能很有用。您可以将 ROLL 轴值设置为比俯仰轴更激进的值,然后继续调整以重新优化该配置的 FF/P/I/D 值。
完成曲调¶
一旦你学会了合理的调谐参数 自动调谐 您应该通过手动调整其他键来完成调谐 参数。
大多数机身所需的参数是:
NAVL1_PERIOD:默认为 25,这是一个非常保守的值 旨在应对调整不良的机身。它控制 飞机将在自动模式下转弯(例如自动、RTL 和 LOITER)。 大多数飞机应使用明显较低的值。一旦你拥有 成功完成了横滚和俯仰值的自动调谐,如果您尚未调整,则应NAVL1_PERIOD降至 18。要超越这一点进行调音 关卡,您应该在自动模式下执行矩形任务,并一次将NAVL1_PERIOD向下调整 1 直到飞机以您 很满意,并且在飞行中不会“摇尾巴”。
PTCH2SRV_RLL:此参数控制轮流加多少电梯 保持鼻子水平。许多飞机需要对此进行小改动 参数,默认值为 1.0。查看是否需要调整此值 您应该在FBWA模式下通过握住副翼杆保持紧密的圆圈 很难结束,同时没有给出任何电梯输入。如果飞机获得 高度,然后你应该降低PTCH2SRV_RLL少量(尝试 最初降至 0.95)。如果飞机在盘旋时失去高度 然后尝试少量提高PTCH2SRV_RLL(最初尝试 1.05)。 如果您需要高于 1.3 或低于 0.8,那么可能有一个 设置有问题(例如重心不正确、质量差) 推力线,空速校准差,球场上的曲调太软 循环或错误的指南针错误)。您应该尝试修复设置。
还有许多其他参数可以提高性能 你的飞机,但这些是大多数人需要的。请阅读 有关详细信息,请参阅常规手动调优文档。
自动调谐日志记录¶
自动调谐的进度记录在数据闪存日志中。如果你 正在尝试调试自动调谐或在论坛上发布有关自动调谐的信息 然后请包括数据闪存日志。
下面是自动调谐会话中的典型日志文件:
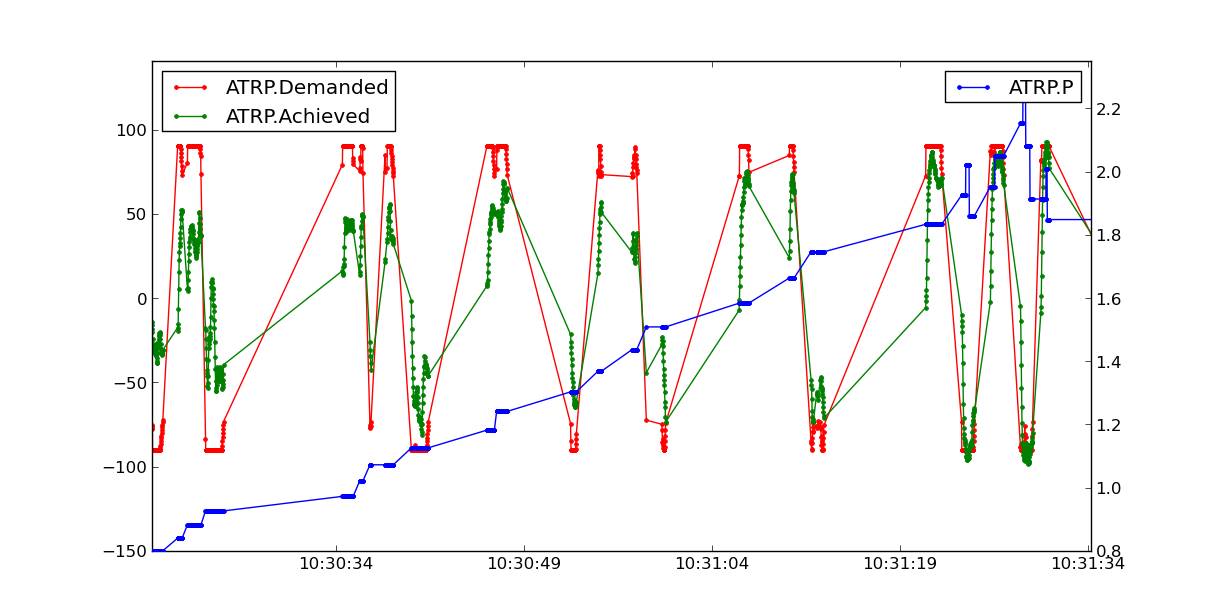
ATRP 消息有一个“类型”字段,显示自动调谐的类型 正在录制。Type 值 0 表示滚动调整,值 1 用于音高调谐。绘制 ATRP 结果时,应选择数据 类型为 0 或 1(不是两者)。
ATRP。需求字段是态度变化(滚动)的需求速率 速率或俯仰速率),以度/秒为单位。ATRP。实现的字段为 飞机在姿态变化率方面实际实现了什么。尽你所能 在上图中,在自动调谐开始时需要的值 远高于实现的,因为调谐增益太高 低。随着曲调的进行,要求和实现开始 合流。上图中的蓝线是 ATRP。P 值,即 控制器的P增益。你可以看到它从0.8上升到一个高点 2.2,然后小幅回落至1.85左右。
您还会注意到图表中有间隙。这是针对时期的 飞行员不要求高姿态变化率的地方。这 自动调谐系统仅在飞行员要求快速姿态时工作 更改(高于最大速率的 80%)。
手动调谐与自动调谐¶
为了在平面上获得最佳性能,您可以执行手动操作 调整,也许从自动调谐中的值开始。自动调谐 系统被设计为一个保守的系统,以获得合理的值 大多数飞机,它不是“完美的调谐器”,手动调谐可能会导致 如果您投入时间和精力,性能会更好。但它需要使用 并分析日志文件结果。
但是,仍然建议每个人都从AUTOTUNE开始。 正确调整飞机并不容易,而 AUTOTUNE 比 绝大多数用户都可以做到。所以从自动调谐开始,然后 探索手动调优指南,从自动调谐产生什么开始,如果 你想把事情推得更远。
手动增加D增益可以提高轧辊的精度和 俯仰响应,使飞机受阵风和湍流的影响较小。 高性能调谐的D增益的最佳值可由下式找到 以小增量增加增益,直到飞机开始 振荡。然后,增益应从导致它的值减半 振荡。使用此方法生成的振荡可以 很大,因此除非您准备执行此步骤,否则不要执行此步骤 手动控制。建议在 降低油门设置和空速。
如果您手动调整 I 增益,那么这也会更改 P是保持正确响应所必需的,因此调整I 仅建议高级用户使用 GAIN。
AUTOTUNE_LEVEL设置¶
水平
速率 [度/秒]
1
20
2
30
3
40
4
50
5
60
6(默认)
75
7
90
8
120
9
160
10
210
11
300
注意
偏航角速度目标(如果调整)始终为 90 度/秒
Last updated